
Sarvesh Patil
@nagababa.bsky.social
240 followers
290 following
12 posts
Your friendly neighborhood roboticist!
PhD student @cmurobotics.bsky.social
Interested in Dexterous Manipulation, Democratization of Robots and Sensors, Sample Efficient RL, Soft Robotics, Causality, Multi-Agent Systems.
servo97.github.io
Posts
Media
Videos
Starter Packs

Sarvesh Patil
@nagababa.bsky.social
· Jun 28
Sarvesh Patil
@nagababa.bsky.social
· Jun 28
Sarvesh Patil
@nagababa.bsky.social
· Jun 28
Sarvesh Patil
@nagababa.bsky.social
· Jun 28
Sarvesh Patil
@nagababa.bsky.social
· Jun 28
Reposted by Sarvesh Patil

Reposted by Sarvesh Patil

Chris Amato
@cjdamato.bsky.social
· Jan 7

A First Introduction to Cooperative Multi-Agent Reinforcement Learning
Multi-agent reinforcement learning (MARL) has exploded in popularity in recent years. While numerous approaches have been developed, they can be broadly categorized into three main types: centralized ...
arxiv.org
Sarvesh Patil
@nagababa.bsky.social
· Jan 5
Sarvesh Patil
@nagababa.bsky.social
· Dec 28
Reposted by Sarvesh Patil


Sarvesh Patil
@nagababa.bsky.social
· Dec 20
Reposted by Sarvesh Patil
Csaba Szepesvari
@skiandsolve.bsky.social
· Dec 19
Sarvesh Patil
@nagababa.bsky.social
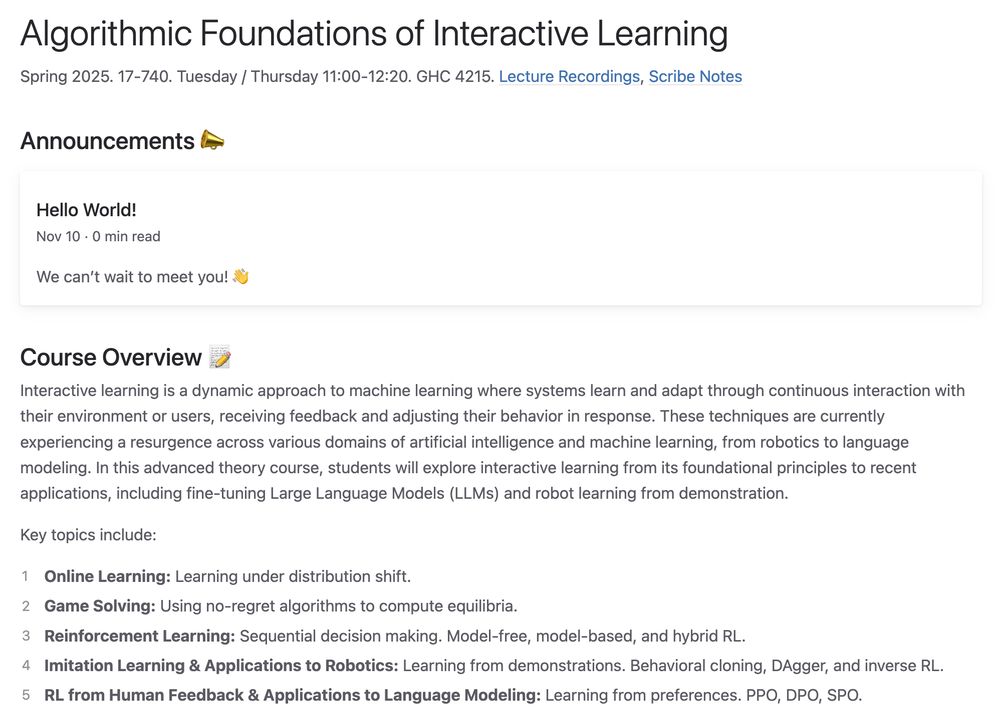
· Dec 16
Reposted by Sarvesh Patil

Sarvesh Patil
@nagababa.bsky.social
· Nov 30
Reposted by Sarvesh Patil
