



Pranay Thangeda
@pthangeda.bsky.social
I like robotics and decision making in (almost) every flavor :)
PhD Candidate at UIUC and Applied Science Intern at Amazon Robotics.
PhD Candidate at UIUC and Applied Science Intern at Amazon Robotics.
As we are wrapping up 2024, here is my robotics wish-list for 2025:
1. A sub $1000 arm with high repeatability and >= 1.5 Kg payload
2. A sub $2000 fully holonomic mobile base like TidyBot++, preferably with vertical linear rails like Watney Robotics: watneyrobotics.com
1. A sub $1000 arm with high repeatability and >= 1.5 Kg payload
2. A sub $2000 fully holonomic mobile base like TidyBot++, preferably with vertical linear rails like Watney Robotics: watneyrobotics.com
January 1, 2025 at 12:08 AM
As we are wrapping up 2024, here is my robotics wish-list for 2025:
1. A sub $1000 arm with high repeatability and >= 1.5 Kg payload
2. A sub $2000 fully holonomic mobile base like TidyBot++, preferably with vertical linear rails like Watney Robotics: watneyrobotics.com
1. A sub $1000 arm with high repeatability and >= 1.5 Kg payload
2. A sub $2000 fully holonomic mobile base like TidyBot++, preferably with vertical linear rails like Watney Robotics: watneyrobotics.com
So writefull - which seems to be some sort of AI-assisted writing tool - popped up on my overleaf by default. I looked at some of it's suggestion and boy it's very opinionated in writing style lol
I wonder if this would lead to every paper being written in the same generic tone
I wonder if this would lead to every paper being written in the same generic tone
December 11, 2024 at 7:33 PM
So writefull - which seems to be some sort of AI-assisted writing tool - popped up on my overleaf by default. I looked at some of it's suggestion and boy it's very opinionated in writing style lol
I wonder if this would lead to every paper being written in the same generic tone
I wonder if this would lead to every paper being written in the same generic tone
What are these PhD-level tasks?!

December 6, 2024 at 5:00 PM
What are these PhD-level tasks?!
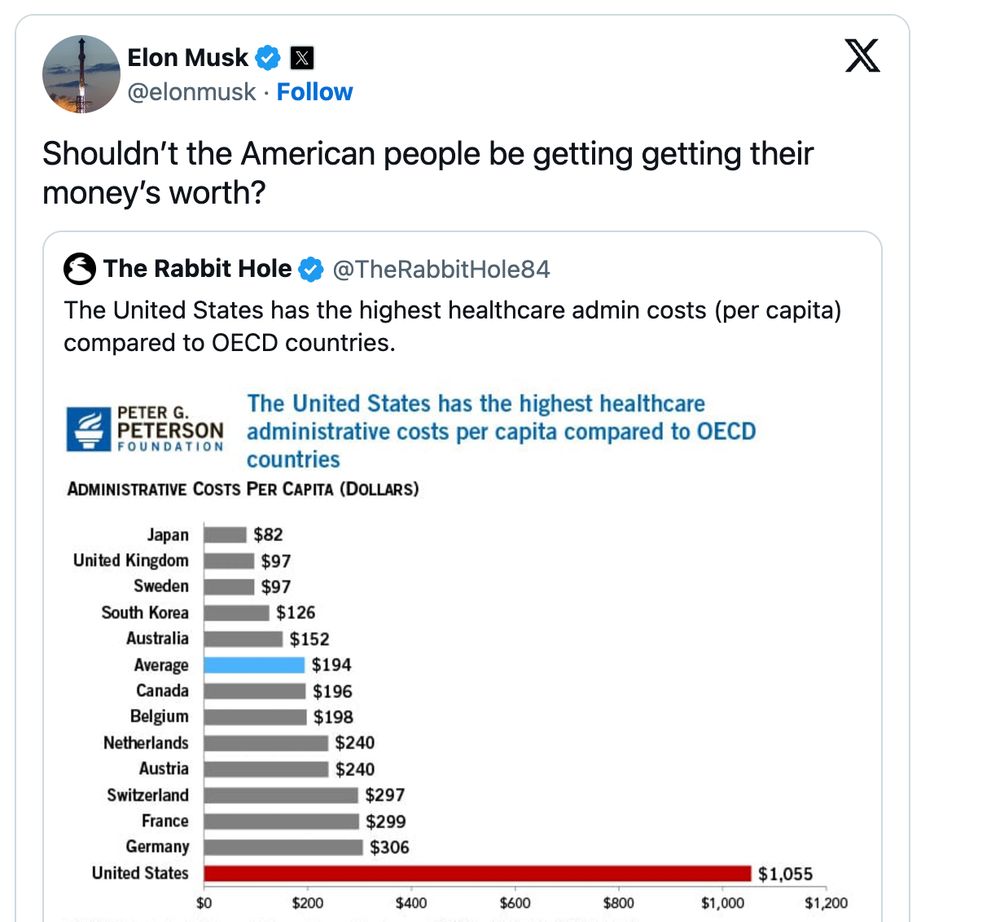
And yet all these posts somehow conveniently ignore the fact the in Switzerland health insurance is completely provided through private insurers and yet has like 1/3 the admin costs of US
Quite ironic they mention arrogance and ignorance.
Quite ironic they mention arrogance and ignorance.

Sometimes the combination of arrogance and ignorance is breathtaking. Yes, US health care has high admin costs; that's because it relies so much on private insurers. Govt-run health insurance has much lower overhead
December 6, 2024 at 2:25 PM
And yet all these posts somehow conveniently ignore the fact the in Switzerland health insurance is completely provided through private insurers and yet has like 1/3 the admin costs of US
Quite ironic they mention arrogance and ignorance.
Quite ironic they mention arrogance and ignorance.
I just realized that until recently almost all robot arms in research labs were from European companies. e.g., UR5, Franka Panda, KUKA.
Most platforms that researchers are getting these days are from China, e.g., Unitree, AgileX, etc.
Most platforms that researchers are getting these days are from China, e.g., Unitree, AgileX, etc.
November 28, 2024 at 7:35 PM
I just realized that until recently almost all robot arms in research labs were from European companies. e.g., UR5, Franka Panda, KUKA.
Most platforms that researchers are getting these days are from China, e.g., Unitree, AgileX, etc.
Most platforms that researchers are getting these days are from China, e.g., Unitree, AgileX, etc.
I keep telling my friends my life would be so much easier if we had a subreddit with grad students working on robot learning. People rarely say "Pranay wtf why did you even do a-b-c when you could have just done z" on my face.

I think we need an AMA series for Robotics / Embodied AI with an optional anonymous setting. Will be both fun and informative to new community members to absorb folk knowledge.

Does everyone in your community agree on some folk knowledge that isn’t published anywhere? Put it in a paper! It’s a pretty valuable contribution
November 27, 2024 at 5:01 PM
I keep telling my friends my life would be so much easier if we had a subreddit with grad students working on robot learning. People rarely say "Pranay wtf why did you even do a-b-c when you could have just done z" on my face.
Don’t get me wrong, I love the fact that every tool/library has an active discord server these days.
But does it really have to be discord? It’s a closed forum, none of the discussions are indexed by search engines. I google something and never find an answer but it was in discord a while ago!
But does it really have to be discord? It’s a closed forum, none of the discussions are indexed by search engines. I google something and never find an answer but it was in discord a while ago!
November 23, 2024 at 5:28 PM
Don’t get me wrong, I love the fact that every tool/library has an active discord server these days.
But does it really have to be discord? It’s a closed forum, none of the discussions are indexed by search engines. I google something and never find an answer but it was in discord a while ago!
But does it really have to be discord? It’s a closed forum, none of the discussions are indexed by search engines. I google something and never find an answer but it was in discord a while ago!
The lack of bookmark option is bsky is getting annoying as I spend more and more time here. I always knew I was a hoarder but damn I miss bookmarking a lot
Like bsky at least let me dm myself so that I can use it as a proxy for my bookmarks! This shouldn’t be that hard to implement, right?
Like bsky at least let me dm myself so that I can use it as a proxy for my bookmarks! This shouldn’t be that hard to implement, right?
November 19, 2024 at 7:42 AM
The lack of bookmark option is bsky is getting annoying as I spend more and more time here. I always knew I was a hoarder but damn I miss bookmarking a lot
Like bsky at least let me dm myself so that I can use it as a proxy for my bookmarks! This shouldn’t be that hard to implement, right?
Like bsky at least let me dm myself so that I can use it as a proxy for my bookmarks! This shouldn’t be that hard to implement, right?
Rerun (rerun.io) is honestly a must have in your robotics workflow, especially if you have data from multiple modalities!
I found it a few months ago and use it almost every single day either to monitor a process online or to inspect some of the data I logged.
I found it a few months ago and use it almost every single day either to monitor a process online or to inspect some of the data I logged.
November 14, 2024 at 11:11 PM
Rerun (rerun.io) is honestly a must have in your robotics workflow, especially if you have data from multiple modalities!
I found it a few months ago and use it almost every single day either to monitor a process online or to inspect some of the data I logged.
I found it a few months ago and use it almost every single day either to monitor a process online or to inspect some of the data I logged.
Well it’s my first day on this app and this is the first tweet so I’ll start with a hot take: free space motion should be planned not learned.
Arm motion without contact ? Plan a trajectory. Robot navigating in home from A to B? Do the same! Just because we can learn it doesn’t mean we should.
Arm motion without contact ? Plan a trajectory. Robot navigating in home from A to B? Do the same! Just because we can learn it doesn’t mean we should.
November 14, 2024 at 6:18 AM
Well it’s my first day on this app and this is the first tweet so I’ll start with a hot take: free space motion should be planned not learned.
Arm motion without contact ? Plan a trajectory. Robot navigating in home from A to B? Do the same! Just because we can learn it doesn’t mean we should.
Arm motion without contact ? Plan a trajectory. Robot navigating in home from A to B? Do the same! Just because we can learn it doesn’t mean we should.