



vmoens
@vmoens.bsky.social
Member of technical staff @periodiclabs
Open-source/open science advocate
Maintainer of torchrl / tensordict / leanrl
Former MD - Neuroscience PhD
https://github.com/vmoens
Open-source/open science advocate
Maintainer of torchrl / tensordict / leanrl
Former MD - Neuroscience PhD
https://github.com/vmoens

Today we're opensourcing MLGym, an API for AI research agents.
MLGym relies on a gym environment that wraps a docker image. Each env has a task specified as a YAML file, telling in plain english what you want your LLM to achieve
👇
MLGym relies on a gym environment that wraps a docker image. Each env has a task specified as a YAML file, telling in plain english what you want your LLM to achieve
👇

February 21, 2025 at 4:44 PM
Today we're opensourcing MLGym, an API for AI research agents.
MLGym relies on a gym environment that wraps a docker image. Each env has a task specified as a YAML file, telling in plain english what you want your LLM to achieve
👇
MLGym relies on a gym environment that wraps a docker image. Each env has a task specified as a YAML file, telling in plain english what you want your LLM to achieve
👇
Wrong answers only:
What does this `Human-computer` sticker seen at neurips hide?
What does this `Human-computer` sticker seen at neurips hide?

December 19, 2024 at 10:53 AM
Wrong answers only:
What does this `Human-computer` sticker seen at neurips hide?
What does this `Human-computer` sticker seen at neurips hide?
Check out Motivo, a behavioral foundation model for humanoid control by FAIR.
It's a one-of-its-kind unsupervised RL project, and it comes with a demo that is SO fun to play with!
metamotivo.metademolab.com
(for the record, they use compile and cudagraphs -> github.com/facebookrese...)
It's a one-of-its-kind unsupervised RL project, and it comes with a demo that is SO fun to play with!
metamotivo.metademolab.com
(for the record, they use compile and cudagraphs -> github.com/facebookrese...)
December 14, 2024 at 12:44 AM
Check out Motivo, a behavioral foundation model for humanoid control by FAIR.
It's a one-of-its-kind unsupervised RL project, and it comes with a demo that is SO fun to play with!
metamotivo.metademolab.com
(for the record, they use compile and cudagraphs -> github.com/facebookrese...)
It's a one-of-its-kind unsupervised RL project, and it comes with a demo that is SO fun to play with!
metamotivo.metademolab.com
(for the record, they use compile and cudagraphs -> github.com/facebookrese...)
I’m 100% sure this button never does anything

December 13, 2024 at 4:18 AM
I’m 100% sure this button never does anything
Built on TorchRL and PyTorch, BenchMARL ensures high performance and state-of-the-art implementations, while its flexible configuration and standardized reporting make it a breeze to use.

December 11, 2024 at 12:47 AM
Built on TorchRL and PyTorch, BenchMARL ensures high performance and state-of-the-art implementations, while its flexible configuration and standardized reporting make it a breeze to use.
BenchMARL is a cutting-edge training library designed to bring standardized benchmarking to the world of Multi-Agent Reinforcement Learning (MARL). It allows for easy comparison across different algorithms, models, and environments, making it a game-changer for researchers and developers alike.

December 11, 2024 at 12:47 AM
BenchMARL is a cutting-edge training library designed to bring standardized benchmarking to the world of Multi-Agent Reinforcement Learning (MARL). It allows for easy comparison across different algorithms, models, and environments, making it a game-changer for researchers and developers alike.
Tomorrow with Matteo Bettini we'll be presenting BenchMARL at #NeurIPS (@neuripsconf.bsky.social) in #Vancouver

December 11, 2024 at 12:47 AM
Tomorrow with Matteo Bettini we'll be presenting BenchMARL at #NeurIPS (@neuripsconf.bsky.social) in #Vancouver
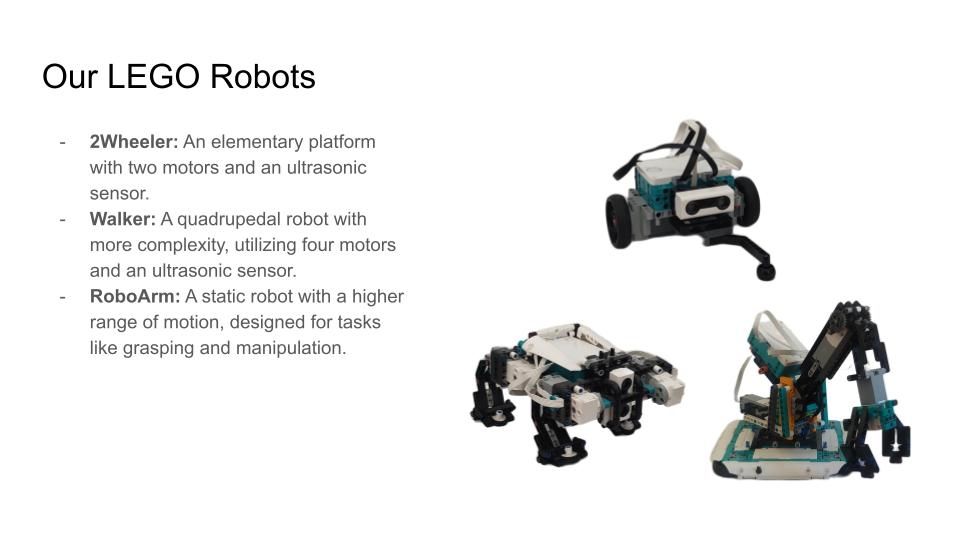
We believe @PyTorch should have a stronger place in STEM education. With BricksRL, we aim to provide a fun and interactive way to learn about control and Reinforcement Learning, inspiring the next generation of researchers and engineers
December 9, 2024 at 7:19 PM
We believe @PyTorch should have a stronger place in STEM education. With BricksRL, we aim to provide a fun and interactive way to learn about control and Reinforcement Learning, inspiring the next generation of researchers and engineers
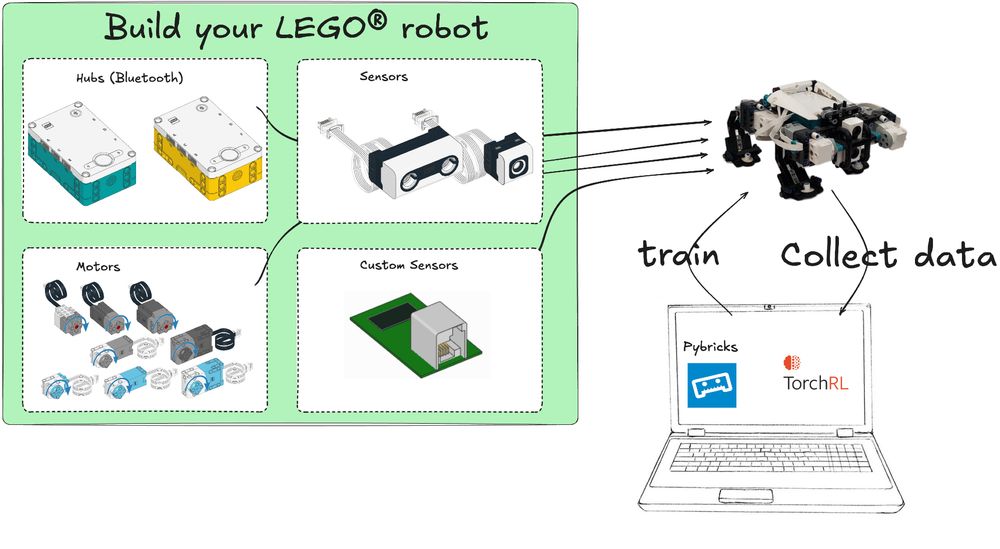
Why Lego? It offers low-cost hardware for learning & experimenting with control or Reinforcement Learning in the real world. Standardized, reproducible, and fun! Plus, the Lego community is active and vibrant, making it a great fit for our project.
December 9, 2024 at 7:19 PM
Why Lego? It offers low-cost hardware for learning & experimenting with control or Reinforcement Learning in the real world. Standardized, reproducible, and fun! Plus, the Lego community is active and vibrant, making it a great fit for our project.
I'm teaming up with Sebastian Ditter & @gdefabritiis.bsky.social to present our paper on BricksRL, a library that enables control of Lego robots using #PyTorch

December 9, 2024 at 7:19 PM
I'm teaming up with Sebastian Ditter & @gdefabritiis.bsky.social to present our paper on BricksRL, a library that enables control of Lego robots using #PyTorch
I'm excited to be in #Vancouver for #NeurIPS 2024 where I brought a bunch of @LEGO_Group bricks in my bag!
*no, I'm not Santa!
*no, I'm not Santa!

December 9, 2024 at 7:19 PM
I'm excited to be in #Vancouver for #NeurIPS 2024 where I brought a bunch of @LEGO_Group bricks in my bag!
*no, I'm not Santa!
*no, I'm not Santa!
They've already taken over london!

November 29, 2024 at 1:37 PM
They've already taken over london!

You know this annoying thing where you're thinking "I'd like to see the code of this pytorch class!" and you cick on source and it leads you to some weird looking html page?
Fear no more! Now (on the `main` doc) you'll end up right on github!
Fear no more! Now (on the `main` doc) you'll end up right on github!

November 27, 2024 at 8:55 AM
You know this annoying thing where you're thinking "I'd like to see the code of this pytorch class!" and you cick on source and it leads you to some weird looking html page?
Fear no more! Now (on the `main` doc) you'll end up right on github!
Fear no more! Now (on the `main` doc) you'll end up right on github!
Not only that, but you also get a better utilization of your GPU: the total usage with compile and cudagraphs is lower than eager, compile or cudagraphs in isolation, meaning that you could for instance easily train two networks at the same time.

November 22, 2024 at 6:38 AM
Not only that, but you also get a better utilization of your GPU: the total usage with compile and cudagraphs is lower than eager, compile or cudagraphs in isolation, meaning that you could for instance easily train two networks at the same time.
We get an 6.8x speed-up with PPO (Atari), 5.7x for SAC, 3.4x for TD3 and 2.7x for PPO with continuous actions.

November 22, 2024 at 6:38 AM
We get an 6.8x speed-up with PPO (Atari), 5.7x for SAC, 3.4x for TD3 and 2.7x for PPO with continuous actions.
One of my fav projects: LeanRL, a simple RL library that provides recipes for fast RL training using torch.compile and cudagraphs.
Using these, we got >6x speed-ups compared to the original CleanRL implementations.
github.com/pytorch-labs...
Using these, we got >6x speed-ups compared to the original CleanRL implementations.
github.com/pytorch-labs...

November 22, 2024 at 6:38 AM
One of my fav projects: LeanRL, a simple RL library that provides recipes for fast RL training using torch.compile and cudagraphs.
Using these, we got >6x speed-ups compared to the original CleanRL implementations.
github.com/pytorch-labs...
Using these, we got >6x speed-ups compared to the original CleanRL implementations.
github.com/pytorch-labs...
I stand by my point that any interesting math equation is better understood in code format

November 21, 2024 at 4:03 PM
I stand by my point that any interesting math equation is better understood in code format