



IEEE Transactions on Robotics (T-RO)
@ieeetro.bsky.social
The IEEE Transactions on Robotics (T-RO) publishes major advances in the state-of-the-art in all areas of robotics including theory, design, experimental studies, analysis, algorithms, and integration and application case studies.
This system lets drones fly autonomously through tunnels as narrow as 0.5 m in diameter; combining virtual omni-directional perception + a motion planner that handles low-light, sparse visual features, and airflow disturbances beating human pilots.
ieeexplore.ieee.org/document/109...
#Quadrotors
ieeexplore.ieee.org/document/109...
#Quadrotors

November 25, 2025 at 5:55 PM
This system lets drones fly autonomously through tunnels as narrow as 0.5 m in diameter; combining virtual omni-directional perception + a motion planner that handles low-light, sparse visual features, and airflow disturbances beating human pilots.
ieeexplore.ieee.org/document/109...
#Quadrotors
ieeexplore.ieee.org/document/109...
#Quadrotors
FlowSight: a fish-inspired #ArtificialLateralLine that lets #UnderwaterRobots ‘feel’ flow in real-time. A vision system watches a #biomimetic tentacle deform, then AI estimates flow vector; enabling closed-loop control and opening new avenues.
ieeexplore.ieee.org/document/109...
ieeexplore.ieee.org/document/109...

November 21, 2025 at 5:02 PM
FlowSight: a fish-inspired #ArtificialLateralLine that lets #UnderwaterRobots ‘feel’ flow in real-time. A vision system watches a #biomimetic tentacle deform, then AI estimates flow vector; enabling closed-loop control and opening new avenues.
ieeexplore.ieee.org/document/109...
ieeexplore.ieee.org/document/109...
Authors introduce a method that automatically selects sensor models and relevant state variables from runtime data—no prior knowledge needed. It integrates into localization frameworks with built-in false-positive checks
ieeexplore.ieee.org/document/110...
#RobotSensingSystems
ieeexplore.ieee.org/document/110...
#RobotSensingSystems

November 7, 2025 at 11:01 PM
Authors introduce a method that automatically selects sensor models and relevant state variables from runtime data—no prior knowledge needed. It integrates into localization frameworks with built-in false-positive checks
ieeexplore.ieee.org/document/110...
#RobotSensingSystems
ieeexplore.ieee.org/document/110...
#RobotSensingSystems
Authors introduce a #TaskPlanning system that adapts to both a human partner’s preferences (whether they like to lead or follow) and performance; jointly handling task allocation + scheduling
ieeexplore.ieee.org/document/110...
#HumanRobotInteraction
ieeexplore.ieee.org/document/110...
#HumanRobotInteraction

November 7, 2025 at 11:00 PM
Authors introduce a #TaskPlanning system that adapts to both a human partner’s preferences (whether they like to lead or follow) and performance; jointly handling task allocation + scheduling
ieeexplore.ieee.org/document/110...
#HumanRobotInteraction
ieeexplore.ieee.org/document/110...
#HumanRobotInteraction
Thank you to the T-RO editorial board for gathering either virtually or in-person in Hangzhou, China last week for our bi-annual board meeting. Our time together included great discussions, new initiatives, and for those in-person a memorably fun dinner at the Hangzhou Cuisine Museum.
#IEEETRO
#IEEETRO



October 30, 2025 at 9:53 AM
Thank you to the T-RO editorial board for gathering either virtually or in-person in Hangzhou, China last week for our bi-annual board meeting. Our time together included great discussions, new initiatives, and for those in-person a memorably fun dinner at the Hangzhou Cuisine Museum.
#IEEETRO
#IEEETRO
RAG, a resource-aware greedy algorithm for #robot #MeshNetworks that only uses neighbor info for decision making. RAG scales linearly with network size, cuts communication/computation loads & yields near-optimal coordination in info gathering
ieeexplore.ieee.org/document/109...
ieeexplore.ieee.org/document/109...

October 13, 2025 at 4:16 AM
RAG, a resource-aware greedy algorithm for #robot #MeshNetworks that only uses neighbor info for decision making. RAG scales linearly with network size, cuts communication/computation loads & yields near-optimal coordination in info gathering
ieeexplore.ieee.org/document/109...
ieeexplore.ieee.org/document/109...
Authors present a unified #ModelPredictiveControl framework for #humanoid balance, integrating ankle, hip, and stepping strategies, with variable angular momentum weighting, optimized step timing, and an HQP whole-body controller.
ieeexplore.ieee.org/document/109...
#LeggedLocomotion
ieeexplore.ieee.org/document/109...
#LeggedLocomotion

October 8, 2025 at 7:17 PM
Authors present a unified #ModelPredictiveControl framework for #humanoid balance, integrating ankle, hip, and stepping strategies, with variable angular momentum weighting, optimized step timing, and an HQP whole-body controller.
ieeexplore.ieee.org/document/109...
#LeggedLocomotion
ieeexplore.ieee.org/document/109...
#LeggedLocomotion
Authors propose a task‑driven co‑design framework that optimizes sensors, planners & compute under safety, cost, energy & weight constraints—demonstrated to show how task complexity affects autonomy stack choices
ieeexplore.ieee.org/document/109...
#RobotSensingSystem #AutonomousVehicle
ieeexplore.ieee.org/document/109...
#RobotSensingSystem #AutonomousVehicle

October 8, 2025 at 7:07 PM
Authors propose a task‑driven co‑design framework that optimizes sensors, planners & compute under safety, cost, energy & weight constraints—demonstrated to show how task complexity affects autonomy stack choices
ieeexplore.ieee.org/document/109...
#RobotSensingSystem #AutonomousVehicle
ieeexplore.ieee.org/document/109...
#RobotSensingSystem #AutonomousVehicle
Authors propose STOCS, a novel algorithm that embeds contact point & timing selection into contact‑implicit trajectory optimization—dramatically improving planning speed and enabling complex contact-rich motions on high-fidelity 3D geometry.
ieeexplore.ieee.org/document/109...
#Robotics
ieeexplore.ieee.org/document/109...
#Robotics

October 1, 2025 at 7:26 PM
Authors propose STOCS, a novel algorithm that embeds contact point & timing selection into contact‑implicit trajectory optimization—dramatically improving planning speed and enabling complex contact-rich motions on high-fidelity 3D geometry.
ieeexplore.ieee.org/document/109...
#Robotics
ieeexplore.ieee.org/document/109...
#Robotics
Researchers propose a compact 6D suction cup model that reduces parameter count from 21 to just 5 via symmetry reduction, achieving ~5 mm and 3° accuracy and robust force estimation even at 60° gripper tilt.
ieeexplore.ieee.org/document/109...
#RobotSensingSystems #RobotManipulator
ieeexplore.ieee.org/document/109...
#RobotSensingSystems #RobotManipulator

October 1, 2025 at 7:20 PM
Researchers propose a compact 6D suction cup model that reduces parameter count from 21 to just 5 via symmetry reduction, achieving ~5 mm and 3° accuracy and robust force estimation even at 60° gripper tilt.
ieeexplore.ieee.org/document/109...
#RobotSensingSystems #RobotManipulator
ieeexplore.ieee.org/document/109...
#RobotSensingSystems #RobotManipulator
Introducing Hierarchical Diffusion Policy that guides robot manipulation with a two‑stage policy—first predicting optimal contact points in 3D, then generating trajectories to reach them via conditional diffusion.
ieeexplore.ieee.org/document/109...
#RobotManipulation #RobotTrajectory
ieeexplore.ieee.org/document/109...
#RobotManipulation #RobotTrajectory

September 24, 2025 at 2:16 PM
Introducing Hierarchical Diffusion Policy that guides robot manipulation with a two‑stage policy—first predicting optimal contact points in 3D, then generating trajectories to reach them via conditional diffusion.
ieeexplore.ieee.org/document/109...
#RobotManipulation #RobotTrajectory
ieeexplore.ieee.org/document/109...
#RobotManipulation #RobotTrajectory
Introducing an autonomous design algorithm that synthesizes self-aligning #KneeJoint mechanisms—no human input—adapts to diverse physiques, completes design in under an hour, and promises fast, scalable exoskeleton deployment.
#HumanCenteredRobotics
#HumanCenteredRobotics

September 18, 2025 at 5:26 PM
Introducing an autonomous design algorithm that synthesizes self-aligning #KneeJoint mechanisms—no human input—adapts to diverse physiques, completes design in under an hour, and promises fast, scalable exoskeleton deployment.
#HumanCenteredRobotics
#HumanCenteredRobotics
A call-for-papers for Foundation Models for Robotics special collection. T-RO is now accepting submissions through November 30.
www.ieee-ras.org/publications...
#FoundationModelsforRobotics #TactileSensing #RobotEmbodiments
www.ieee-ras.org/publications...
#FoundationModelsforRobotics #TactileSensing #RobotEmbodiments

September 5, 2025 at 9:29 PM
A call-for-papers for Foundation Models for Robotics special collection. T-RO is now accepting submissions through November 30.
www.ieee-ras.org/publications...
#FoundationModelsforRobotics #TactileSensing #RobotEmbodiments
www.ieee-ras.org/publications...
#FoundationModelsforRobotics #TactileSensing #RobotEmbodiments
A fly‑inspired two-stage control policy enabling palm‑sized drones to perform dynamic inverted landings on ceilings. Trained via reinforcement learning in simulation (augmented optical‐flow+SVM+neural net)
ieeexplore.ieee.org/document/108...
#AerialSystems #BiologicallyInspiredRobots
ieeexplore.ieee.org/document/108...
#AerialSystems #BiologicallyInspiredRobots
![Bioinspired inverted landing. An illustration comparing an example of inverted landing in a small quadcopter and a blue-bottle fly [10]. Both an at-scale and a scaled-up version of the landing sequence of the blue-bottle fly are shown.](https://cdn.bsky.app/img/feed_thumbnail/plain/did:plc:ttw5tcvxt52gbygtxrgvschk/bafkreibxeu7f5o73wcnqlnjqka7xc7bajdi5ef3rmo2eixtnmlhcyl52wi@jpeg)
August 30, 2025 at 12:48 PM
A fly‑inspired two-stage control policy enabling palm‑sized drones to perform dynamic inverted landings on ceilings. Trained via reinforcement learning in simulation (augmented optical‐flow+SVM+neural net)
ieeexplore.ieee.org/document/108...
#AerialSystems #BiologicallyInspiredRobots
ieeexplore.ieee.org/document/108...
#AerialSystems #BiologicallyInspiredRobots
Presenting a dynamic model‑based cooperative tracking control for both position and orientation of a tensegrity continuum robot’s end‑effector—achieving precise, cooperative movement via a dynamic model.
ieeexplore.ieee.org/abstract/doc...
#ContinuumRobots #RobotSensingSystems
ieeexplore.ieee.org/abstract/doc...
#ContinuumRobots #RobotSensingSystems

August 28, 2025 at 8:41 PM
Presenting a dynamic model‑based cooperative tracking control for both position and orientation of a tensegrity continuum robot’s end‑effector—achieving precise, cooperative movement via a dynamic model.
ieeexplore.ieee.org/abstract/doc...
#ContinuumRobots #RobotSensingSystems
ieeexplore.ieee.org/abstract/doc...
#ContinuumRobots #RobotSensingSystems
T-RO researchers present a novel rhythmic motion control strategy for robotic facial laser treatments by learning rhythmic, geometric-constrained trajectories from expert demonstrations.
ieeexplore.ieee.org/document/108...
#CosmeticDermatologyRobots #ServiceRobots #SkinCare
ieeexplore.ieee.org/document/108...
#CosmeticDermatologyRobots #ServiceRobots #SkinCare

August 20, 2025 at 8:44 PM
T-RO researchers present a novel rhythmic motion control strategy for robotic facial laser treatments by learning rhythmic, geometric-constrained trajectories from expert demonstrations.
ieeexplore.ieee.org/document/108...
#CosmeticDermatologyRobots #ServiceRobots #SkinCare
ieeexplore.ieee.org/document/108...
#CosmeticDermatologyRobots #ServiceRobots #SkinCare
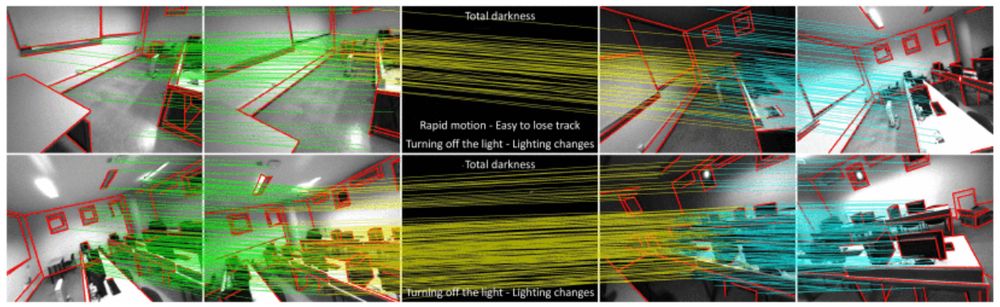
A transformer-based, coarse-to-fine #VisualLocalization pipeline that extracts stable, illumination-invariant descriptors for place recognition, achieves sub-meter global relocalization in under 0.5 s across 2 km and provides real-time tracking.
ieeexplore.ieee.org/document/108...
ieeexplore.ieee.org/document/108...

August 15, 2025 at 3:58 PM
A transformer-based, coarse-to-fine #VisualLocalization pipeline that extracts stable, illumination-invariant descriptors for place recognition, achieves sub-meter global relocalization in under 0.5 s across 2 km and provides real-time tracking.
ieeexplore.ieee.org/document/108...
ieeexplore.ieee.org/document/108...
AQUA‑SLAM, a tightly coupled acoustic‑visual‑inertial #SLAM system fusing DVL, stereo vision, and IMU within a graph‑based framework. With novel online calibration it achieves state‑of‑the‑art underwater localization, validated in North Sea trials.
ieeexplore.ieee.org/document/109...
ieeexplore.ieee.org/document/109...

August 15, 2025 at 3:10 PM
AQUA‑SLAM, a tightly coupled acoustic‑visual‑inertial #SLAM system fusing DVL, stereo vision, and IMU within a graph‑based framework. With novel online calibration it achieves state‑of‑the‑art underwater localization, validated in North Sea trials.
ieeexplore.ieee.org/document/109...
ieeexplore.ieee.org/document/109...
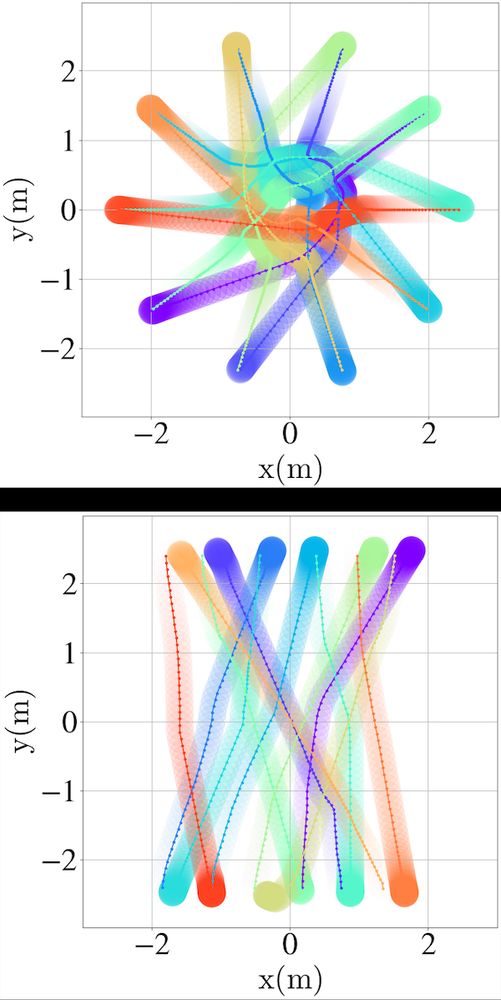
Authors introduce AVOCADO. The two-stage planner estimates other agents’ cooperation levels using nonlinear opinion dynamics, then adapts a Velocity-Obstacle policy for robust, communication-free crowd navigation
ieeexplore.ieee.org/document/109...
#CollisionAvoidance #RobotSensingSystem #Robotics
ieeexplore.ieee.org/document/109...
#CollisionAvoidance #RobotSensingSystem #Robotics
July 29, 2025 at 5:30 PM
Authors introduce AVOCADO. The two-stage planner estimates other agents’ cooperation levels using nonlinear opinion dynamics, then adapts a Velocity-Obstacle policy for robust, communication-free crowd navigation
ieeexplore.ieee.org/document/109...
#CollisionAvoidance #RobotSensingSystem #Robotics
ieeexplore.ieee.org/document/109...
#CollisionAvoidance #RobotSensingSystem #Robotics
Check out the latest on the T-RO Visual SLAM special collection. Keep checking back as many more papers will be added to this collection in the coming months.
ieeexplore.ieee.org/xpl/topics-i...
#VisualSLAM #RobotLearning #GaussianSplatting
ieeexplore.ieee.org/xpl/topics-i...
#VisualSLAM #RobotLearning #GaussianSplatting
July 24, 2025 at 8:00 PM
Check out the latest on the T-RO Visual SLAM special collection. Keep checking back as many more papers will be added to this collection in the coming months.
ieeexplore.ieee.org/xpl/topics-i...
#VisualSLAM #RobotLearning #GaussianSplatting
ieeexplore.ieee.org/xpl/topics-i...
#VisualSLAM #RobotLearning #GaussianSplatting
A huge welcome to our new T-RO editorial board members. We are grateful for your commitment to the journal and look forward to working with you. Thank you!
www.ieee-ras.org/publications...
#IEEEras #Robotics
www.ieee-ras.org/publications...
#IEEEras #Robotics
July 22, 2025 at 7:57 PM
A huge welcome to our new T-RO editorial board members. We are grateful for your commitment to the journal and look forward to working with you. Thank you!
www.ieee-ras.org/publications...
#IEEEras #Robotics
www.ieee-ras.org/publications...
#IEEEras #Robotics
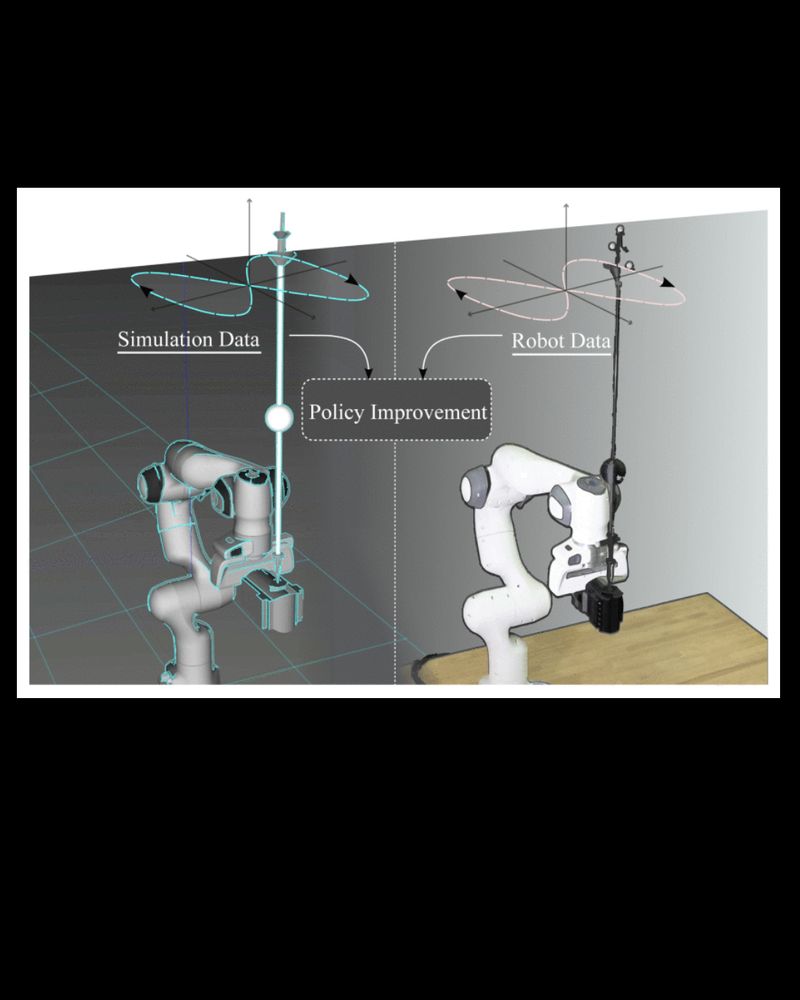
Researchers introduce a hybrid real‑to‑sim‑to‑real learning approach that helps robots adapt quickly to new tasks with minimal trials. The result? Faster learning and stronger performance with fewer attempts.
ieeexplore.ieee.org/abstract/doc...
#RobotLearning #BayesMethod #SimToReal
ieeexplore.ieee.org/abstract/doc...
#RobotLearning #BayesMethod #SimToReal
July 18, 2025 at 7:43 PM
Researchers introduce a hybrid real‑to‑sim‑to‑real learning approach that helps robots adapt quickly to new tasks with minimal trials. The result? Faster learning and stronger performance with fewer attempts.
ieeexplore.ieee.org/abstract/doc...
#RobotLearning #BayesMethod #SimToReal
ieeexplore.ieee.org/abstract/doc...
#RobotLearning #BayesMethod #SimToReal
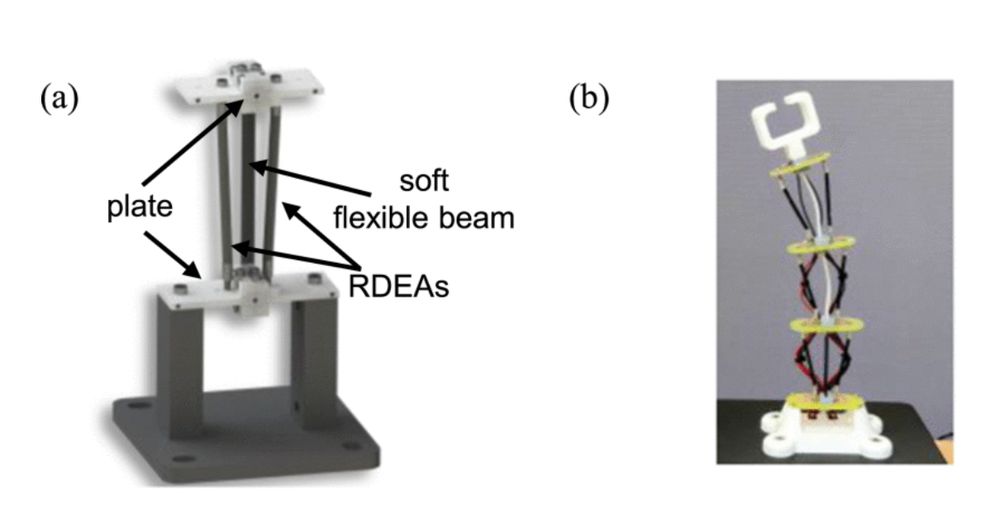
The first experimental validation of model-based robust position control for an underactuated dielectric elastomer #SoftRobot! This shows the controller stabilizing arbitrary configurations despite underactuation & input saturation.
ieeexplore.ieee.org/document/108...
#Robotics #ControlSystems
ieeexplore.ieee.org/document/108...
#Robotics #ControlSystems
July 18, 2025 at 7:36 PM
The first experimental validation of model-based robust position control for an underactuated dielectric elastomer #SoftRobot! This shows the controller stabilizing arbitrary configurations despite underactuation & input saturation.
ieeexplore.ieee.org/document/108...
#Robotics #ControlSystems
ieeexplore.ieee.org/document/108...
#Robotics #ControlSystems
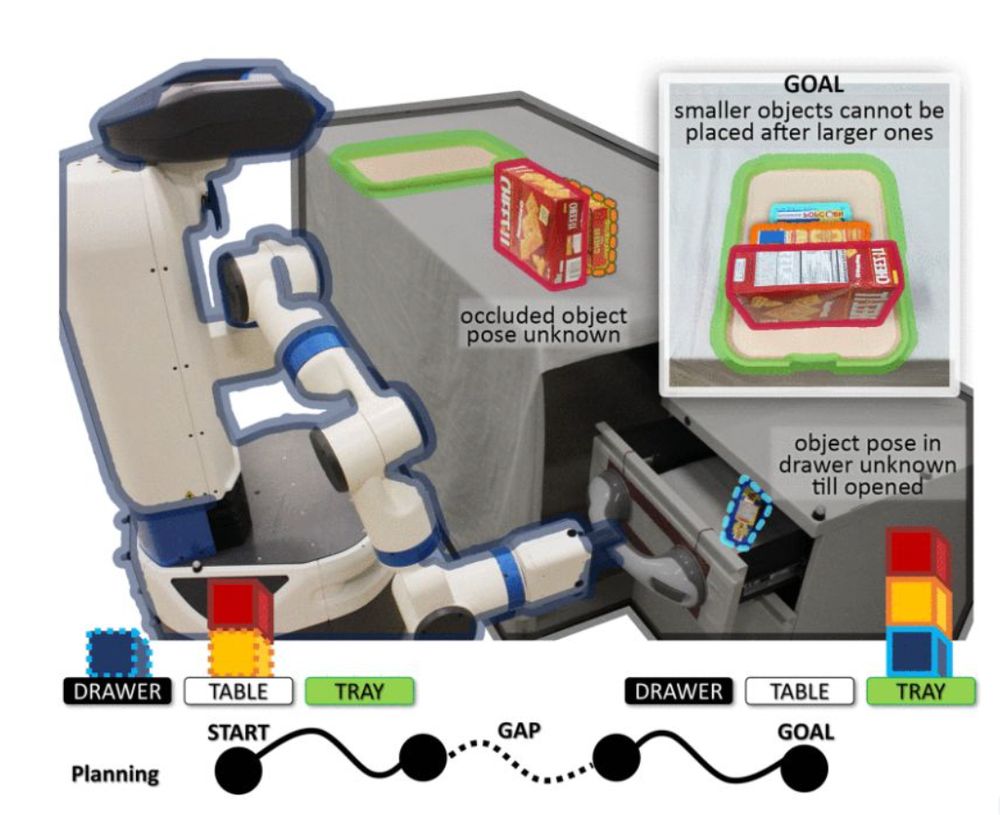
T-RO Honorable Mention paper entitled “Task and Motion Planning for Execution in the Real” introduces a framework integrating task and motion planning for real-world robotic execution under uncertainty, improving adaptability
ieeexplore.ieee.org/document/105...
#RobotSensingSystems #Robotics
ieeexplore.ieee.org/document/105...
#RobotSensingSystems #Robotics
July 11, 2025 at 11:45 AM
T-RO Honorable Mention paper entitled “Task and Motion Planning for Execution in the Real” introduces a framework integrating task and motion planning for real-world robotic execution under uncertainty, improving adaptability
ieeexplore.ieee.org/document/105...
#RobotSensingSystems #Robotics
ieeexplore.ieee.org/document/105...
#RobotSensingSystems #Robotics
T-RO is proud to announce the upcoming special collection, Foundation Models for Robotics. Submission window opens September 1.
#RobotEmbodiments #FoundationModels #RoboticsFoundationModels #RoboticVLM #RoboticsLLM #IEEERAS
#RobotEmbodiments #FoundationModels #RoboticsFoundationModels #RoboticVLM #RoboticsLLM #IEEERAS
July 10, 2025 at 8:55 PM
T-RO is proud to announce the upcoming special collection, Foundation Models for Robotics. Submission window opens September 1.
#RobotEmbodiments #FoundationModels #RoboticsFoundationModels #RoboticVLM #RoboticsLLM #IEEERAS
#RobotEmbodiments #FoundationModels #RoboticsFoundationModels #RoboticVLM #RoboticsLLM #IEEERAS