



Momchil Tomov
@momchiltomov.bsky.social
Cognitive Neuroscientist @ Harvard, AI Researcher @ Motional
Models of human & robot decision making in complex environments, including video games and urban driving. https://www.momchiltomov.com/
Models of human & robot decision making in complex environments, including video games and urban driving. https://www.momchiltomov.com/
Excited to share a new preprint based on my work this past year:
**TreeIRL** is a novel planner that combines classical search with learning-based methods to achieve state-of-the-art performance in simulation and in **real-world autonomous driving**! 🚘 🤖 🚀
**TreeIRL** is a novel planner that combines classical search with learning-based methods to achieve state-of-the-art performance in simulation and in **real-world autonomous driving**! 🚘 🤖 🚀

September 18, 2025 at 3:39 PM
Excited to share a new preprint based on my work this past year:
**TreeIRL** is a novel planner that combines classical search with learning-based methods to achieve state-of-the-art performance in simulation and in **real-world autonomous driving**! 🚘 🤖 🚀
**TreeIRL** is a novel planner that combines classical search with learning-based methods to achieve state-of-the-art performance in simulation and in **real-world autonomous driving**! 🚘 🤖 🚀
Reposted by Momchil Tomov

Our paper on foraging is now published in Neuron! Read it here:
www.cell.com/neuron/fullt...
This project was co-led by Michael Bukwich (not on Bluesky) and me, with major contributions from all co-authors. Huge thanks to the whole team!
www.cell.com/neuron/fullt...
This project was co-led by Michael Bukwich (not on Bluesky) and me, with major contributions from all co-authors. Huge thanks to the whole team!
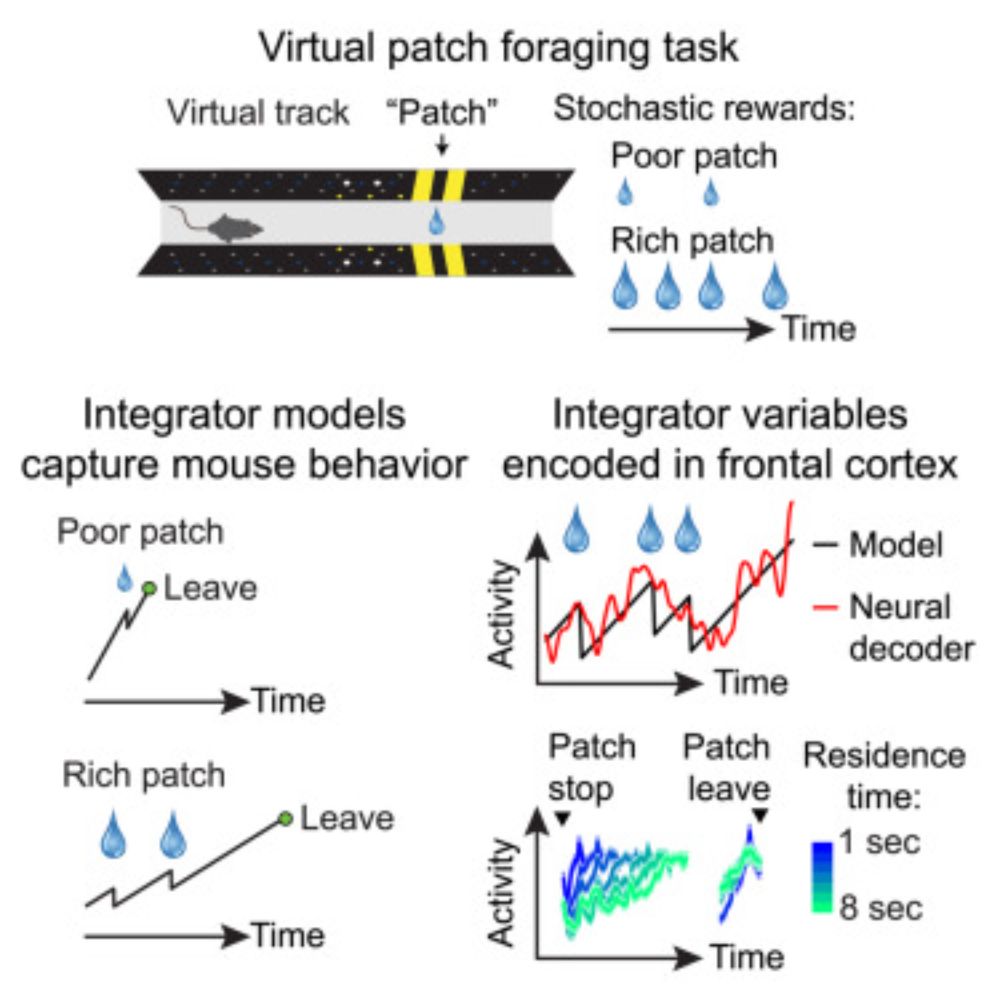
Competitive integration of time and reward explains value-sensitive foraging decisions and frontal cortex ramping dynamics
Bukwich and Campbell et al. show that mice integrate elapsed time and reward intake,
scaled by a latent patience variable, to decide when to leave virtual “patches.” Frontal
cortex ramping activity ma...
www.cell.com
August 7, 2025 at 5:35 PM
Our paper on foraging is now published in Neuron! Read it here:
www.cell.com/neuron/fullt...
This project was co-led by Michael Bukwich (not on Bluesky) and me, with major contributions from all co-authors. Huge thanks to the whole team!
www.cell.com/neuron/fullt...
This project was co-led by Michael Bukwich (not on Bluesky) and me, with major contributions from all co-authors. Huge thanks to the whole team!