Alberto Comoretto
@albertocomoretto.bsky.social
69 followers
59 following
29 posts
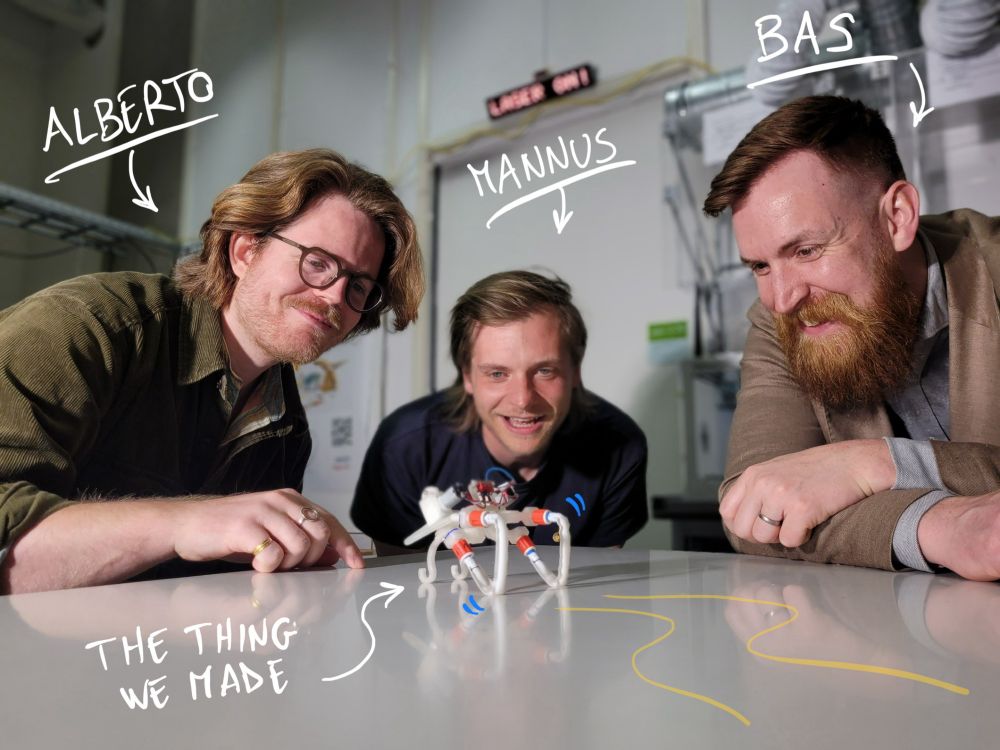
Postdoc at KU Leuven.
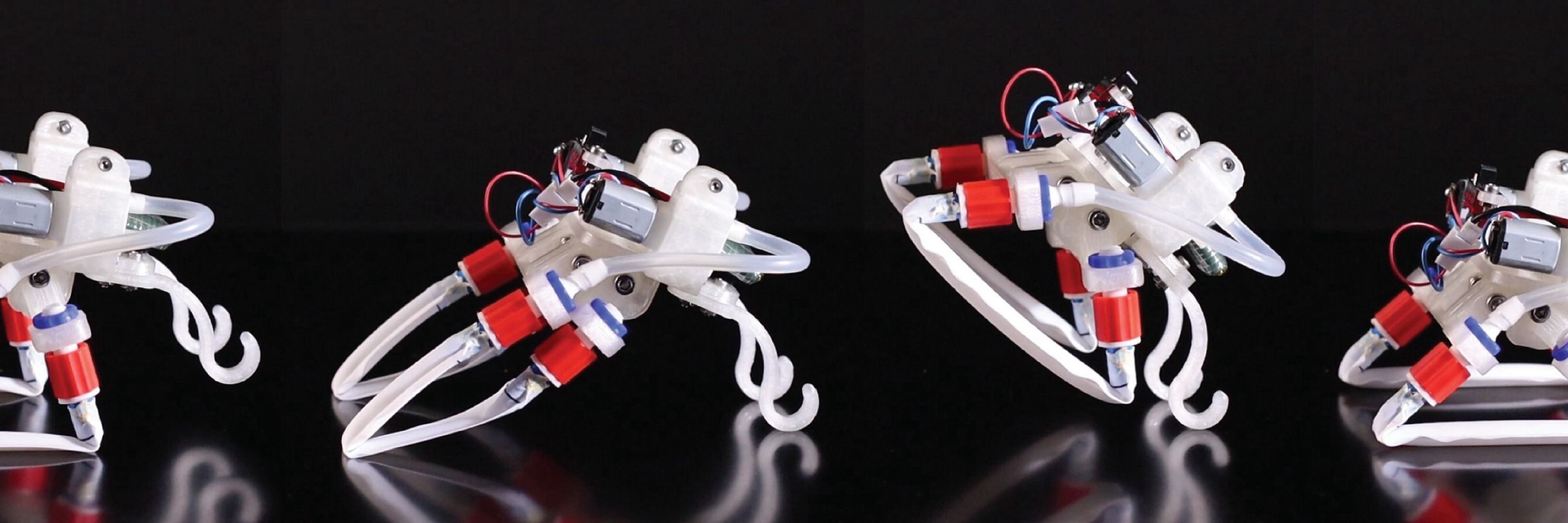
I research squishy machines and autonomous soft matter 🦠 🤖
Inflatables 🎈 fluidics 🫧 mechanical instabilities ⛓️💥 and self-oscillators 🌀
https://www.albertocomoretto.com/
Posts
Media
Videos
Starter Packs
Pinned








Reposted by Alberto Comoretto


Reposted by Alberto Comoretto


Reposted by Alberto Comoretto
Reposted by Alberto Comoretto



Reposted by Alberto Comoretto
Reposted by Alberto Comoretto


Reposted by Alberto Comoretto




Reposted by Alberto Comoretto


Reposted by Alberto Comoretto