




Giovanni Beltrame
@beltrame.mistlab.ca
Professor in Computer Engineering at Polytechnique Montreal. Field and Swarm Robotics. Mila-Quebec affiliate. Director of MIST Lab and Astrolith (astrolith.ca)
3/3 We also provide ad-hoc networking and multi-robot coordination for mission planning. All code is #opensource and available for download on GitHub.
Project page: mistlab.ca/MGGPlanner/
Paper: ieeexplore.ieee.org/iel8/7083369...
Code: github.com/MISTLab/MGGP...
Video: youtu.be/Fv8B0Ml0KCY?...
Project page: mistlab.ca/MGGPlanner/
Paper: ieeexplore.ieee.org/iel8/7083369...
Code: github.com/MISTLab/MGGP...
Video: youtu.be/Fv8B0Ml0KCY?...
February 4, 2025 at 11:22 AM
3/3 We also provide ad-hoc networking and multi-robot coordination for mission planning. All code is #opensource and available for download on GitHub.
Project page: mistlab.ca/MGGPlanner/
Paper: ieeexplore.ieee.org/iel8/7083369...
Code: github.com/MISTLab/MGGP...
Video: youtu.be/Fv8B0Ml0KCY?...
Project page: mistlab.ca/MGGPlanner/
Paper: ieeexplore.ieee.org/iel8/7083369...
Code: github.com/MISTLab/MGGP...
Video: youtu.be/Fv8B0Ml0KCY?...
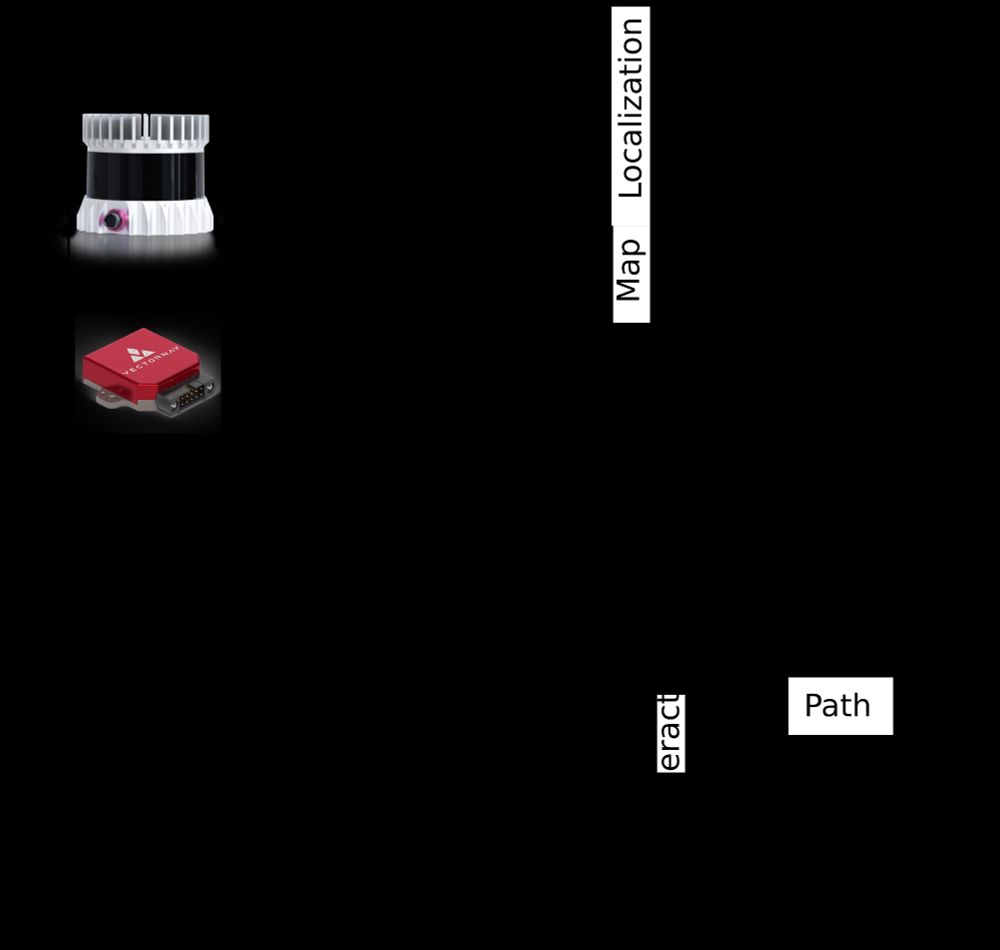
2/3 We tested the planner at the Canadian Space Agency Mars Yard with multiple rovers using lidar-inertial sensing and show superior exploration coverage as well as 50% lower runtime compared to state-of-the-art methods.

February 4, 2025 at 11:22 AM
2/3 We tested the planner at the Canadian Space Agency Mars Yard with multiple rovers using lidar-inertial sensing and show superior exploration coverage as well as 50% lower runtime compared to state-of-the-art methods.
Reposted by Giovanni Beltrame

I'm really excited about structure from motion, which is having a real renaissance (ACE0, FlowMap, MASt3R-SfM, VGGSfM, GLOMAP, etc). It will be cool to see how SfM methods interact with VLMs -- SfM always seems like the last problem to jump on the latest bandwagon, but maybe that will change.
November 27, 2024 at 4:02 PM
I'm really excited about structure from motion, which is having a real renaissance (ACE0, FlowMap, MASt3R-SfM, VGGSfM, GLOMAP, etc). It will be cool to see how SfM methods interact with VLMs -- SfM always seems like the last problem to jump on the latest bandwagon, but maybe that will change.
Hello and welcome! (I'm one of your colleagues :)
November 29, 2024 at 8:38 PM
Hello and welcome! (I'm one of your colleagues :)
The migration is happening!
November 28, 2024 at 9:55 PM
The migration is happening!
That's a great point! There has been a few works in this area (including ours) and there's a lot more to do:
Modeling RL with delays to maintain the Markov assumption
openreview.net/forum?id=QFY...
Learning variable control rates and adapting action duration
arxiv.org/html/2407.00...
Modeling RL with delays to maintain the Markov assumption
openreview.net/forum?id=QFY...
Learning variable control rates and adapting action duration
arxiv.org/html/2407.00...

Reinforcement Learning with Random Delays
Action and observation delays commonly occur in many Reinforcement Learning applications, such as remote control scenarios. We study the anatomy of randomly delayed environments, and show that...
openreview.net
November 25, 2024 at 11:09 AM
That's a great point! There has been a few works in this area (including ours) and there's a lot more to do:
Modeling RL with delays to maintain the Markov assumption
openreview.net/forum?id=QFY...
Learning variable control rates and adapting action duration
arxiv.org/html/2407.00...
Modeling RL with delays to maintain the Markov assumption
openreview.net/forum?id=QFY...
Learning variable control rates and adapting action duration
arxiv.org/html/2407.00...