Gaspard Lambrechts
@gsprd.be
2.1K followers
650 following
26 posts
PhD Student doing RL in POMDP at the University of Liège - Intern at McGill - gsprd.be
Posts
Media
Videos
Starter Packs
Reposted by Gaspard Lambrechts


Reposted by Gaspard Lambrechts

Reposted by Gaspard Lambrechts


Gaspard Lambrechts
@gsprd.be
· Jun 9

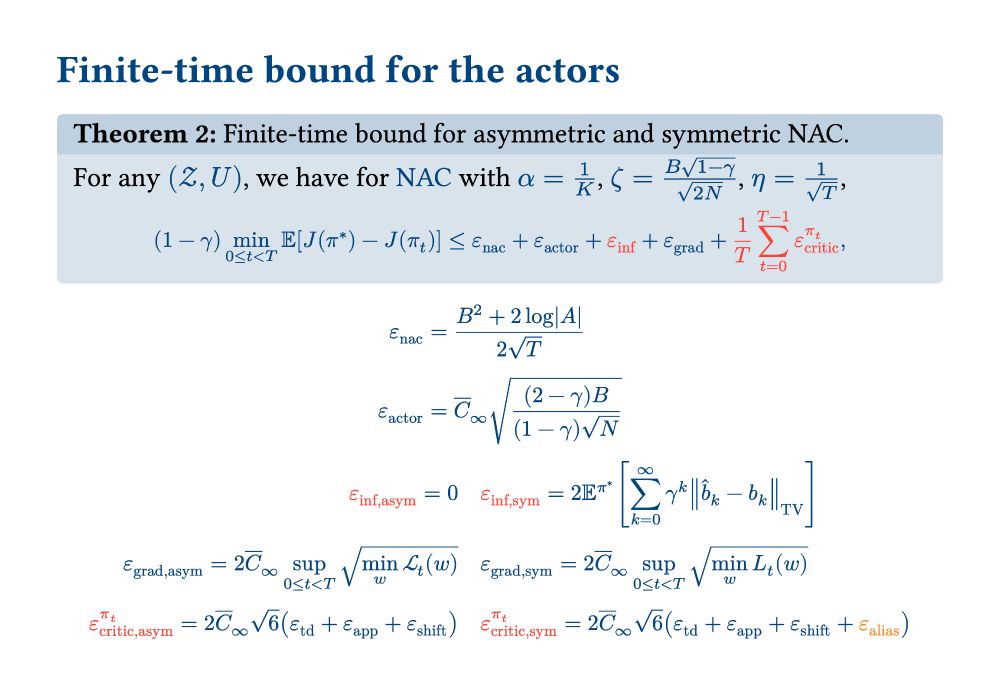
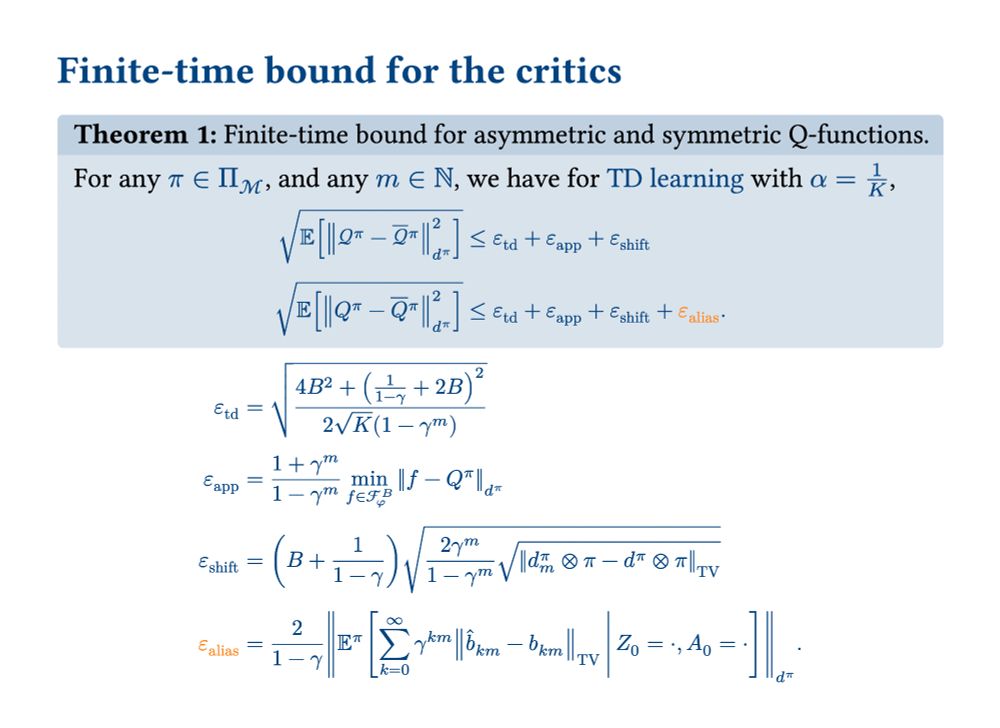
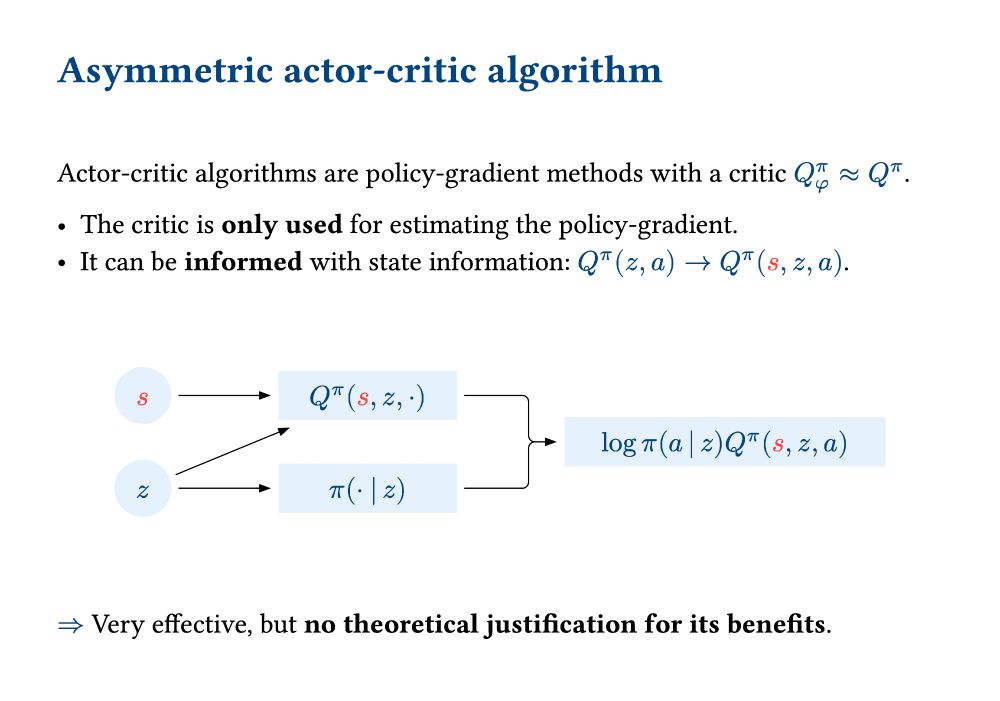
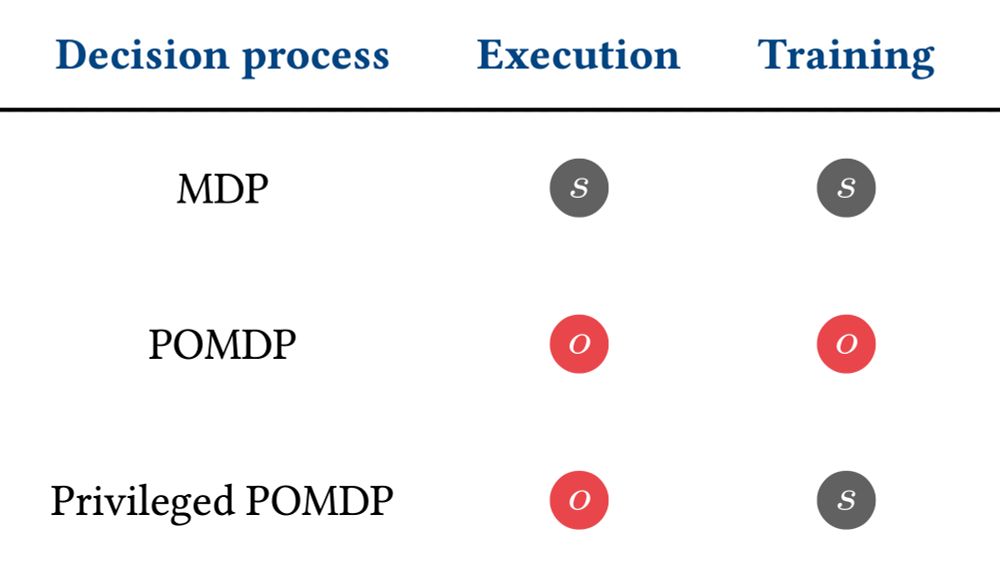
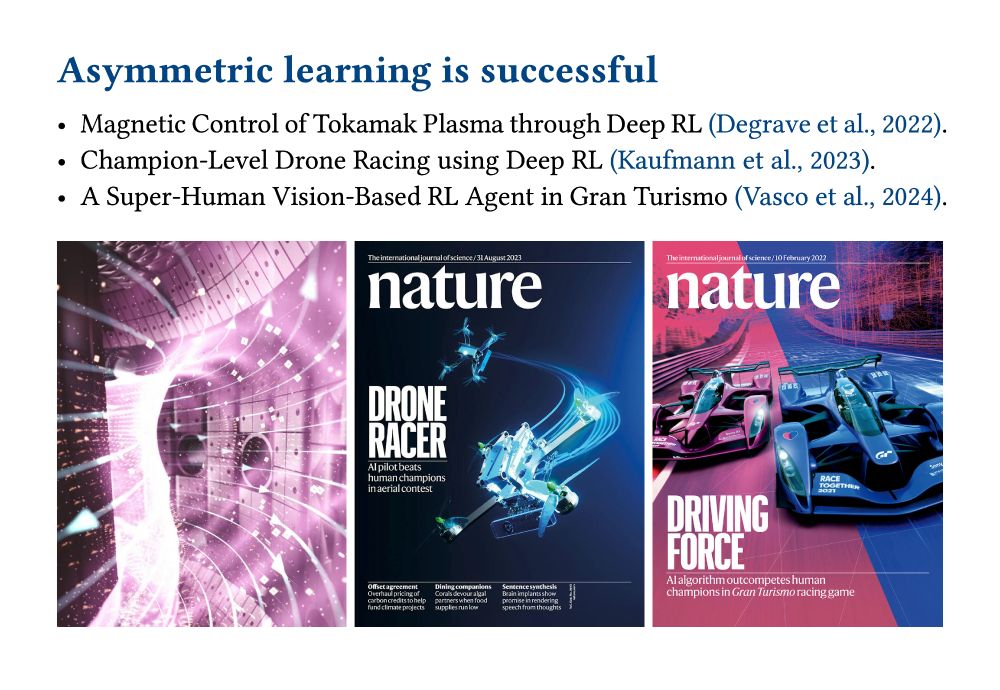
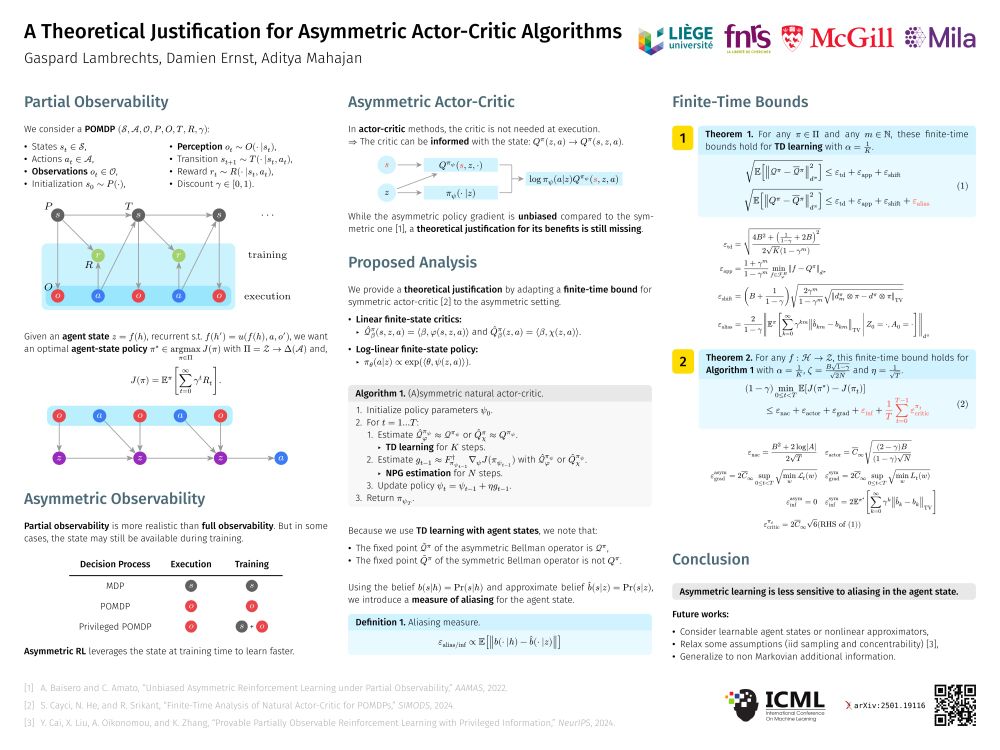
A Theoretical Justification for Asymmetric Actor-Critic Algorithms
In reinforcement learning for partially observable environments, many successful algorithms have been developed within the asymmetric learning paradigm. This paradigm leverages additional state inform...
arxiv.org
Gaspard Lambrechts
@gsprd.be
· Jun 9
Gaspard Lambrechts
@gsprd.be
· Jun 9