



Hermann Blum
@hermannblum.bsky.social
ML & CV for robot perception
assistant professor @ Uni Bonn & Lamarr Institute
interested in self-learning & autonomous robots, likes all the messy hardware problems of real-world experiments
https://rpl.uni-bonn.de/
https://hermannblum.net/
assistant professor @ Uni Bonn & Lamarr Institute
interested in self-learning & autonomous robots, likes all the messy hardware problems of real-world experiments
https://rpl.uni-bonn.de/
https://hermannblum.net/
CroCoDL Workshop at #ICCV, next talk coming up in Room 301B:
16.30 - 17.00: @sattlertorsten.bsky.social on Vision Localization Across Modalities
full schedule: localizoo.com/workshop
16.30 - 17.00: @sattlertorsten.bsky.social on Vision Localization Across Modalities
full schedule: localizoo.com/workshop

October 21, 2025 at 2:15 AM
CroCoDL Workshop at #ICCV, next talk coming up in Room 301B:
16.30 - 17.00: @sattlertorsten.bsky.social on Vision Localization Across Modalities
full schedule: localizoo.com/workshop
16.30 - 17.00: @sattlertorsten.bsky.social on Vision Localization Across Modalities
full schedule: localizoo.com/workshop
In 30 mins! CroCoDL Poster Session (posters #248-#257), during the official coffee break 3pm - 4pm.
Contributed works cover Visual Localization, Visual Place Recognition, Room Layout Estimation, Novel View Synthesis, 3D Reconstruction
Contributed works cover Visual Localization, Visual Place Recognition, Room Layout Estimation, Novel View Synthesis, 3D Reconstruction

October 21, 2025 at 12:30 AM
In 30 mins! CroCoDL Poster Session (posters #248-#257), during the official coffee break 3pm - 4pm.
Contributed works cover Visual Localization, Visual Place Recognition, Room Layout Estimation, Novel View Synthesis, 3D Reconstruction
Contributed works cover Visual Localization, Visual Place Recognition, Room Layout Estimation, Novel View Synthesis, 3D Reconstruction
CroCoDL Workshop at #ICCV, next talk coming up in Room 301B:
14.15 - 14.45: @ayoungk.bsky.social on Bridging heterogeneous sensors for robust and generalizable localization
full schedule: localizoo.com/workshop/
14.15 - 14.45: @ayoungk.bsky.social on Bridging heterogeneous sensors for robust and generalizable localization
full schedule: localizoo.com/workshop/

October 21, 2025 at 12:00 AM
CroCoDL Workshop at #ICCV, next talk coming up in Room 301B:
14.15 - 14.45: @ayoungk.bsky.social on Bridging heterogeneous sensors for robust and generalizable localization
full schedule: localizoo.com/workshop/
14.15 - 14.45: @ayoungk.bsky.social on Bridging heterogeneous sensors for robust and generalizable localization
full schedule: localizoo.com/workshop/
CroCoDL Workshop at #ICCV, next talk coming up in Room 301B:
13.15 - 13.45: @gabrielacsurka.bsky.social on Privacy Preserving Visual Localization
full schedule: buff.ly/kM1Ompf
13.15 - 13.45: @gabrielacsurka.bsky.social on Privacy Preserving Visual Localization
full schedule: buff.ly/kM1Ompf

October 20, 2025 at 11:01 PM
CroCoDL Workshop at #ICCV, next talk coming up in Room 301B:
13.15 - 13.45: @gabrielacsurka.bsky.social on Privacy Preserving Visual Localization
full schedule: buff.ly/kM1Ompf
13.15 - 13.45: @gabrielacsurka.bsky.social on Privacy Preserving Visual Localization
full schedule: buff.ly/kM1Ompf
Attending #ICCV? Join the CroCoDL workshop this afternoon!
localizoo.com/workshop
Speakers: @gabrielacsurka.bsky.social, @ayoungk.bsky.social, David Caruso, @sattlertorsten.bsky.social
w/ @zbauer.bsky.social @mihaidusmanu.bsky.social @linfeipan.bsky.social @marcpollefeys.bsky.social
localizoo.com/workshop
Speakers: @gabrielacsurka.bsky.social, @ayoungk.bsky.social, David Caruso, @sattlertorsten.bsky.social
w/ @zbauer.bsky.social @mihaidusmanu.bsky.social @linfeipan.bsky.social @marcpollefeys.bsky.social
October 20, 2025 at 9:01 PM
Attending #ICCV? Join the CroCoDL workshop this afternoon!
localizoo.com/workshop
Speakers: @gabrielacsurka.bsky.social, @ayoungk.bsky.social, David Caruso, @sattlertorsten.bsky.social
w/ @zbauer.bsky.social @mihaidusmanu.bsky.social @linfeipan.bsky.social @marcpollefeys.bsky.social
localizoo.com/workshop
Speakers: @gabrielacsurka.bsky.social, @ayoungk.bsky.social, David Caruso, @sattlertorsten.bsky.social
w/ @zbauer.bsky.social @mihaidusmanu.bsky.social @linfeipan.bsky.social @marcpollefeys.bsky.social
Today a delivery arrived that marks an exciting milestone for my lab: our first research grant!

September 5, 2025 at 7:59 PM
Today a delivery arrived that marks an exciting milestone for my lab: our first research grant!
We just released code, models, and data for FrontierNet!
Key idea 💡Instead of detecting froniers in a map, we directly predict them from images. Hence, FrontierNet can implicitly learn visual semantic priors to estimate information gain. That speeds up exploration compared to geometric heuristics.
Key idea 💡Instead of detecting froniers in a map, we directly predict them from images. Hence, FrontierNet can implicitly learn visual semantic priors to estimate information gain. That speeds up exploration compared to geometric heuristics.
July 17, 2025 at 8:34 AM
We just released code, models, and data for FrontierNet!
Key idea 💡Instead of detecting froniers in a map, we directly predict them from images. Hence, FrontierNet can implicitly learn visual semantic priors to estimate information gain. That speeds up exploration compared to geometric heuristics.
Key idea 💡Instead of detecting froniers in a map, we directly predict them from images. Hence, FrontierNet can implicitly learn visual semantic priors to estimate information gain. That speeds up exploration compared to geometric heuristics.
This is the first time in a while I am creating a new talk. This will be fun!
I'll be up later today at the Visual SLAM workshop at @roboticsscisys.bsky.social
buff.ly/ADHxPsX
I'll be up later today at the Visual SLAM workshop at @roboticsscisys.bsky.social
buff.ly/ADHxPsX
June 21, 2025 at 8:34 AM
This is the first time in a while I am creating a new talk. This will be fun!
I'll be up later today at the Visual SLAM workshop at @roboticsscisys.bsky.social
buff.ly/ADHxPsX
I'll be up later today at the Visual SLAM workshop at @roboticsscisys.bsky.social
buff.ly/ADHxPsX
Finally arriving home today after attending @cvprconference.bsky.social . This was the first #CVPR that I could attend in person! I expected it to be super crowded but was surprised - lots of time and space for chats at the poster session and the 15min talks could really go into detail.

June 19, 2025 at 2:58 PM
Finally arriving home today after attending @cvprconference.bsky.social . This was the first #CVPR that I could attend in person! I expected it to be super crowded but was surprised - lots of time and space for chats at the poster session and the 15min talks could really go into detail.
all set for our poster lineup at the cv4mr.github.io #cvpr workshop
June 11, 2025 at 3:32 PM
all set for our poster lineup at the cv4mr.github.io #cvpr workshop
If you‘re watching #eurovision tonight, look out for the robots from ETH!
Really cool to see something I could work with during my PhD featured as a swiss highlight 🤖
Really cool to see something I could work with during my PhD featured as a swiss highlight 🤖

May 17, 2025 at 7:37 PM
If you‘re watching #eurovision tonight, look out for the robots from ETH!
Really cool to see something I could work with during my PhD featured as a swiss highlight 🤖
Really cool to see something I could work with during my PhD featured as a swiss highlight 🤖
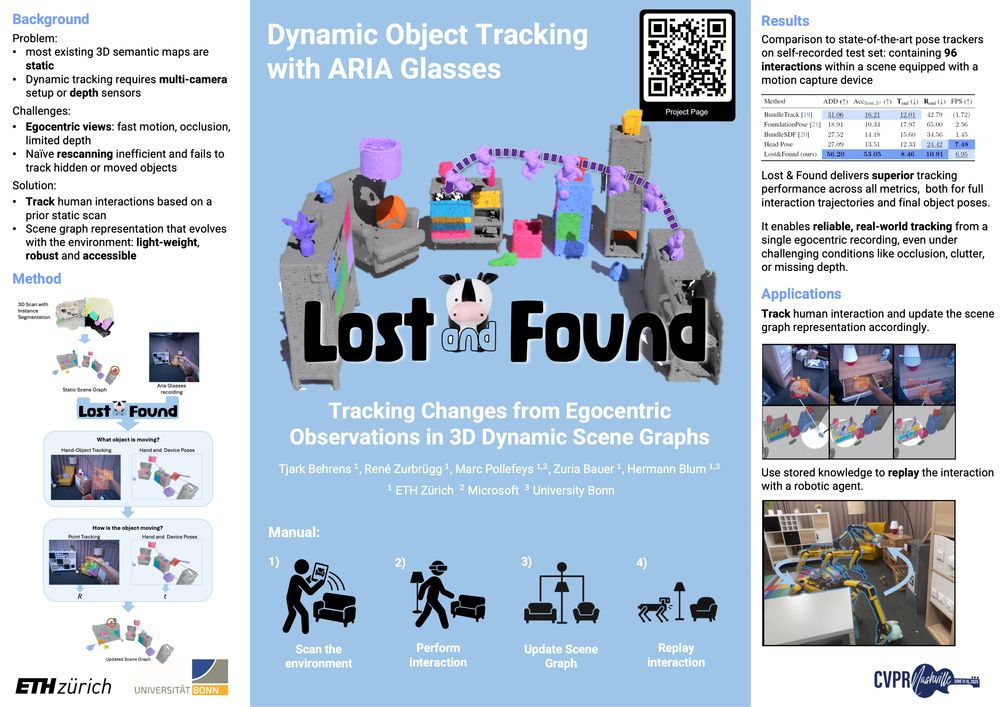
Turns out aria-glasses are a very useful tool to demonstrate actions to robots: Based on egocentric video we track dynamic changes in a scene graph and use the representation to replay or plan interactions for robots
🔗 behretj.github.io/LostAndFound/
📄 arxiv.org/abs/2411.19162
📺 youtu.be/xxMsaBSeMXo
🔗 behretj.github.io/LostAndFound/
📄 arxiv.org/abs/2411.19162
📺 youtu.be/xxMsaBSeMXo
December 3, 2024 at 12:01 PM
Turns out aria-glasses are a very useful tool to demonstrate actions to robots: Based on egocentric video we track dynamic changes in a scene graph and use the representation to replay or plan interactions for robots
🔗 behretj.github.io/LostAndFound/
📄 arxiv.org/abs/2411.19162
📺 youtu.be/xxMsaBSeMXo
🔗 behretj.github.io/LostAndFound/
📄 arxiv.org/abs/2411.19162
📺 youtu.be/xxMsaBSeMXo
Are you also a bit exhausted after
#ICRA
submission week? Let us brighten your day with a real "SpotLight" 💡
🔗 timengelbracht.github.io/SpotLight/
📄 arxiv.org/abs/2409.11870
We detect and generate interaction for almost any light switch and can then map which switch turns on which light
#Robotics
#ICRA
submission week? Let us brighten your day with a real "SpotLight" 💡
🔗 timengelbracht.github.io/SpotLight/
📄 arxiv.org/abs/2409.11870
We detect and generate interaction for almost any light switch and can then map which switch turns on which light
#Robotics
September 19, 2024 at 12:56 PM
Are you also a bit exhausted after
#ICRA
submission week? Let us brighten your day with a real "SpotLight" 💡
🔗 timengelbracht.github.io/SpotLight/
📄 arxiv.org/abs/2409.11870
We detect and generate interaction for almost any light switch and can then map which switch turns on which light
#Robotics
#ICRA
submission week? Let us brighten your day with a real "SpotLight" 💡
🔗 timengelbracht.github.io/SpotLight/
📄 arxiv.org/abs/2409.11870
We detect and generate interaction for almost any light switch and can then map which switch turns on which light
#Robotics