
MuJoCo.org
@mujoco.bsky.social
88 followers
14 following
10 posts
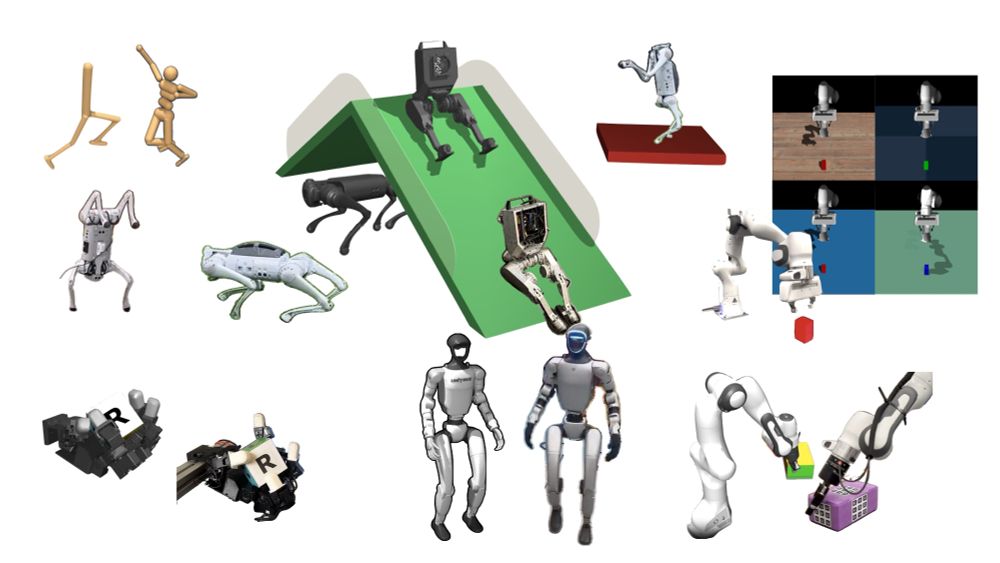
An open-source physics simulator for articulated systems with contacts.
Maintained by Google DeepMind and the community. This is not an officially supported Google product.
Posts
Media
Videos
Starter Packs