



lucasw
@lucasw0.bsky.social
Pinned
lucasw
@lucasw0.bsky.social
· Oct 4

Rust Bevy JoltPhysics vehicle simulation
YouTube video by Lucas Walter
youtu.be
Rust wrapped Jolt Physics visualized in Bevy- each ray-cast simulated lidar point is an individually translated sphere
youtu.be/I2yfPAyACps?...
youtu.be/I2yfPAyACps?...

"We can talk about this in kind of our founder mode episode that we about the importance of trust and clarity. And if you've got trust and clarity, then I think you can have autonomy... I think autonomy is important because I think that's when people do the best work"

Latest Oxide and Friends is up on the pod share.transistor.fm/s/20b6e3dc

Systems Software in the Large | Oxide and Friends | Episode 28
Dave Pacheco is leading Oxide's multi-year effort around full-system update. He recently gave a talk about his experience leading that project, the complexities of designing the system and organizing ...
share.transistor.fm
October 16, 2025 at 3:36 PM
"We can talk about this in kind of our founder mode episode that we about the importance of trust and clarity. And if you've got trust and clarity, then I think you can have autonomy... I think autonomy is important because I think that's when people do the best work"
Reposted by lucasw
Jolt Physics v5.4.0 is out! Check out the release notes here: github.com/jrouwe/JoltP...

Release 5.4.0 · jrouwe/JoltPhysics
There are a few minor breaking changes, see this document.
New Functionality
Added Cosserat rods to soft bodies. This is a stick constraint with an orientation that can be used to attach geometry....
github.com
September 27, 2025 at 12:33 PM
Jolt Physics v5.4.0 is out! Check out the release notes here: github.com/jrouwe/JoltP...
Reposted by lucasw

About a month ago, I gave a talk at the Rust Amsterdam meetup about Sguaba (the type-safe spatial math Rust crate), and the recording of that is now online for anyone who wants their head to hurt with frames of reference and coordinate transforms 😅
youtu.be/kESBAiTYMoQ
youtu.be/kESBAiTYMoQ

Sguaba: Type-safe spatial math in Rust
YouTube video by Jon Gjengset
youtu.be
September 29, 2025 at 2:26 PM
About a month ago, I gave a talk at the Rust Amsterdam meetup about Sguaba (the type-safe spatial math Rust crate), and the recording of that is now online for anyone who wants their head to hurt with frames of reference and coordinate transforms 😅
youtu.be/kESBAiTYMoQ
youtu.be/kESBAiTYMoQ
The 'Rust for Robotics' video is now on youtube: youtu.be/1zLLuWbnuN8?...
October 4, 2025 at 2:59 PM
The 'Rust for Robotics' video is now on youtube: youtu.be/1zLLuWbnuN8?...
Reposted by lucasw

It's been a month since #rustconf 2025, but the buzz is still strong! 🦀
Revisit the magic via these videos on the @rustfoundation.org YouTube channel, incl. sessions, keynotes, & this highlight reel: www.youtube.com/watch?v=Hw_I...
+Don’t miss these event pics 📸 www.flickr.com/photos/rustf...
Revisit the magic via these videos on the @rustfoundation.org YouTube channel, incl. sessions, keynotes, & this highlight reel: www.youtube.com/watch?v=Hw_I...
+Don’t miss these event pics 📸 www.flickr.com/photos/rustf...
October 3, 2025 at 3:34 PM
It's been a month since #rustconf 2025, but the buzz is still strong! 🦀
Revisit the magic via these videos on the @rustfoundation.org YouTube channel, incl. sessions, keynotes, & this highlight reel: www.youtube.com/watch?v=Hw_I...
+Don’t miss these event pics 📸 www.flickr.com/photos/rustf...
Revisit the magic via these videos on the @rustfoundation.org YouTube channel, incl. sessions, keynotes, & this highlight reel: www.youtube.com/watch?v=Hw_I...
+Don’t miss these event pics 📸 www.flickr.com/photos/rustf...
The Jolt Physics 'VehicleConstraintsTest C++ wrapped in rust using cxx- it's working as well as I need it to though I'm not sure if wheel friction is right (are wheels spinning faster than vehicle speed over the ground?). The build process isn't ideal but is workable.
github.com/lucasw/jolt_...
github.com/lucasw/jolt_...
September 18, 2025 at 4:12 PM
The Jolt Physics 'VehicleConstraintsTest C++ wrapped in rust using cxx- it's working as well as I need it to though I'm not sure if wheel friction is right (are wheels spinning faster than vehicle speed over the ground?). The build process isn't ideal but is workable.
github.com/lucasw/jolt_...
github.com/lucasw/jolt_...
A soon-to-be-released book about iRobot: 'Dancing with Roomba: Cracking the Robot Riddle and Building an Icon' dancingwithroomba.com - via @weeklyrobotics.bsky.social (www.weeklyrobotics.com)
Dancing with Roomba – Cracking the Robot Riddle and Building an Icon
dancingwithroomba.com
September 16, 2025 at 3:51 PM
A soon-to-be-released book about iRobot: 'Dancing with Roomba: Cracking the Robot Riddle and Building an Icon' dancingwithroomba.com - via @weeklyrobotics.bsky.social (www.weeklyrobotics.com)
Starting over with getting a Jolt physics vehicle simulation into rust- going to try to put a big chunk of it into C++, then use cxx to manage that through a high level interface to supply inputs, step the sim, and get new state after the step update.
September 10, 2025 at 9:21 PM
Starting over with getting a Jolt physics vehicle simulation into rust- going to try to put a big chunk of it into C++, then use cxx to manage that through a high level interface to supply inputs, step the sim, and get new state after the step update.

I didn't get far with vehicle physics using bevy & rapier physics when I tried a few months ago, but now diving back in- I need physics and I'm willing to wrap C++ for rust, perhaps with bullet, but it turns out there's Jolt github.com/jrouwe/JoltP... and jolt-rust github.com/SecondHalfGa...
GitHub - SecondHalfGames/jolt-rust: Rust bindings to Jolt Physics
Rust bindings to Jolt Physics. Contribute to SecondHalfGames/jolt-rust development by creating an account on GitHub.
github.com
August 28, 2025 at 10:29 PM
I didn't get far with vehicle physics using bevy & rapier physics when I tried a few months ago, but now diving back in- I need physics and I'm willing to wrap C++ for rust, perhaps with bullet, but it turns out there's Jolt github.com/jrouwe/JoltP... and jolt-rust github.com/SecondHalfGa...
Getting sntpc working within embassy was harder than expected, maybe I went about it the wrong way because I ended up forking sntpc to make a very slightly different version of `sntp_process_response()`.
github.com/lucasw/misc_...
github.com/lucasw/misc_...
August 13, 2025 at 1:11 AM
Getting sntpc working within embassy was harder than expected, maybe I went about it the wrong way because I ended up forking sntpc to make a very slightly different version of `sntp_process_response()`.
github.com/lucasw/misc_...
github.com/lucasw/misc_...
Can send udp packets out of the stm32h753 with embassy now github.com/lucasw/misc_... (and the blinky leds are still blinking, which means the async is still asyncing)
This does blinky leds in embassy, has to use newer-than-released embassy because of github.com/embassy-rs/e... (maybe downgrading would have worked too?)
github.com/lucasw/misc_...
Next step is udp send/recv, after that the postcard & sntpc stuff should be easy.
github.com/lucasw/misc_...
Next step is udp send/recv, after that the postcard & sntpc stuff should be easy.
August 9, 2025 at 1:19 AM
Can send udp packets out of the stm32h753 with embassy now github.com/lucasw/misc_... (and the blinky leds are still blinking, which means the async is still asyncing)
Reposted by lucasw

Rust STM32 GPIOs Tutorial
#RustLang #EmbeddedRust #STM32 #GPIO #AsyncRust #EmbassyRs #ProbeRs #RetroROM #Microcontrollers
theoasisbbs.com/rust-stm32-g...
#RustLang #EmbeddedRust #STM32 #GPIO #AsyncRust #EmbassyRs #ProbeRs #RetroROM #Microcontrollers
theoasisbbs.com/rust-stm32-g...
Rust STM32 GPIOs Tutorial - The Oasis BBS
Learn how to build a Rust STM32 GPIOs hardware tester in 60 lines using Embassy and probe-rs. Watch the full tutorial now.
theoasisbbs.com
August 8, 2025 at 1:08 PM
Rust STM32 GPIOs Tutorial
#RustLang #EmbeddedRust #STM32 #GPIO #AsyncRust #EmbassyRs #ProbeRs #RetroROM #Microcontrollers
theoasisbbs.com/rust-stm32-g...
#RustLang #EmbeddedRust #STM32 #GPIO #AsyncRust #EmbassyRs #ProbeRs #RetroROM #Microcontrollers
theoasisbbs.com/rust-stm32-g...
My stm32 rust project has sntpc integration github.com/lucasw/misc_... - sntp_send_request() + sntp_process_response(), results are reported over udp in postcard packets. The systick clock drifts by about 0.3%, it was 50 seconds fast after letting it run for nearly five hours- good enough.
github.com
August 8, 2025 at 2:29 PM
My stm32 rust project has sntpc integration github.com/lucasw/misc_... - sntp_send_request() + sntp_process_response(), results are reported over udp in postcard packets. The systick clock drifts by about 0.3%, it was 50 seconds fast after letting it run for nearly five hours- good enough.
Starting to trade udp postcard encoded messages with an stm32 nucleo 144 dev board (stm32h753 in particular) github.com/lucasw/misc_... There are some issues with broadcasting, maybe I need a newer smoltcp? I could try updating it in github.com/lucasw/nucle...
August 2, 2025 at 2:37 PM
Starting to trade udp postcard encoded messages with an stm32 nucleo 144 dev board (stm32h753 in particular) github.com/lucasw/misc_... There are some issues with broadcasting, maybe I need a newer smoltcp? I could try updating it in github.com/lucasw/nucle...
Reposted by lucasw

Had a gig wrap up a little earlier than expected, I should have availability starting July or so.
As always: if you need help with Embedded, Rust, or similar things, shoot me a message!
If you're a user of postcard, p-rpc, or are interested in the more experimental new ergot: shoot me a message!
As always: if you need help with Embedded, Rust, or similar things, shoot me a message!
If you're a user of postcard, p-rpc, or are interested in the more experimental new ergot: shoot me a message!
June 17, 2025 at 7:29 PM
Had a gig wrap up a little earlier than expected, I should have availability starting July or so.
As always: if you need help with Embedded, Rust, or similar things, shoot me a message!
If you're a user of postcard, p-rpc, or are interested in the more experimental new ergot: shoot me a message!
As always: if you need help with Embedded, Rust, or similar things, shoot me a message!
If you're a user of postcard, p-rpc, or are interested in the more experimental new ergot: shoot me a message!
Serialize and deserialize multiple struct types and transmit with udp in rust with postcard- the example isn't no_std but I'm going to try something similar no-std next: github.com/lucasw/misc_... - there's more boilerplate around the use of the enum than I'd prefer though
misc_rust/net_loopback at main · lucasw/misc_rust
rust projects. Contribute to lucasw/misc_rust development by creating an account on GitHub.
github.com
July 31, 2025 at 3:10 PM
Serialize and deserialize multiple struct types and transmit with udp in rust with postcard- the example isn't no_std but I'm going to try something similar no-std next: github.com/lucasw/misc_... - there's more boilerplate around the use of the enum than I'd prefer though
www.meetup.com/seattle-rust... - the next SRUG (Seattle Rust User Group) meetup: "This event is no longer taking place at Microsoft Reactor, it has been moved to Amazon Oscar in Seattle. It is also now taking place on Thursday August 14."

August, 2025 SRUG (Seattle Rust User Group) Meetup, Thu, Aug 14, 2025, 6:00 PM | Meetup
**August, 2025 SRUG Meeting**
**\*\*NB: New date and location\*\***
This event is no longer taking place at Microsoft Reactor, it has been moved to **Amazon Oscar in Seatt
www.meetup.com
July 30, 2025 at 6:56 PM
www.meetup.com/seattle-rust... - the next SRUG (Seattle Rust User Group) meetup: "This event is no longer taking place at Microsoft Reactor, it has been moved to Amazon Oscar in Seattle. It is also now taking place on Thursday August 14."
nalgebra with no_std got me the error "the trait `RealField` is not implemented for `f32`
... required for `f32` to implement `SimdRealField`" when trying to make a Rotation2 with an angle. Solution: use libm:
nalgebra = { version = "0.33.2", default-features = false, features = ["libm"] }
... required for `f32` to implement `SimdRealField`" when trying to make a Rotation2 with an angle. Solution: use libm:
nalgebra = { version = "0.33.2", default-features = false, features = ["libm"] }
July 12, 2025 at 6:34 PM
nalgebra with no_std got me the error "the trait `RealField` is not implemented for `f32`
... required for `f32` to implement `SimdRealField`" when trying to make a Rotation2 with an angle. Solution: use libm:
nalgebra = { version = "0.33.2", default-features = false, features = ["libm"] }
... required for `f32` to implement `SimdRealField`" when trying to make a Rotation2 with an angle. Solution: use libm:
nalgebra = { version = "0.33.2", default-features = false, features = ["libm"] }
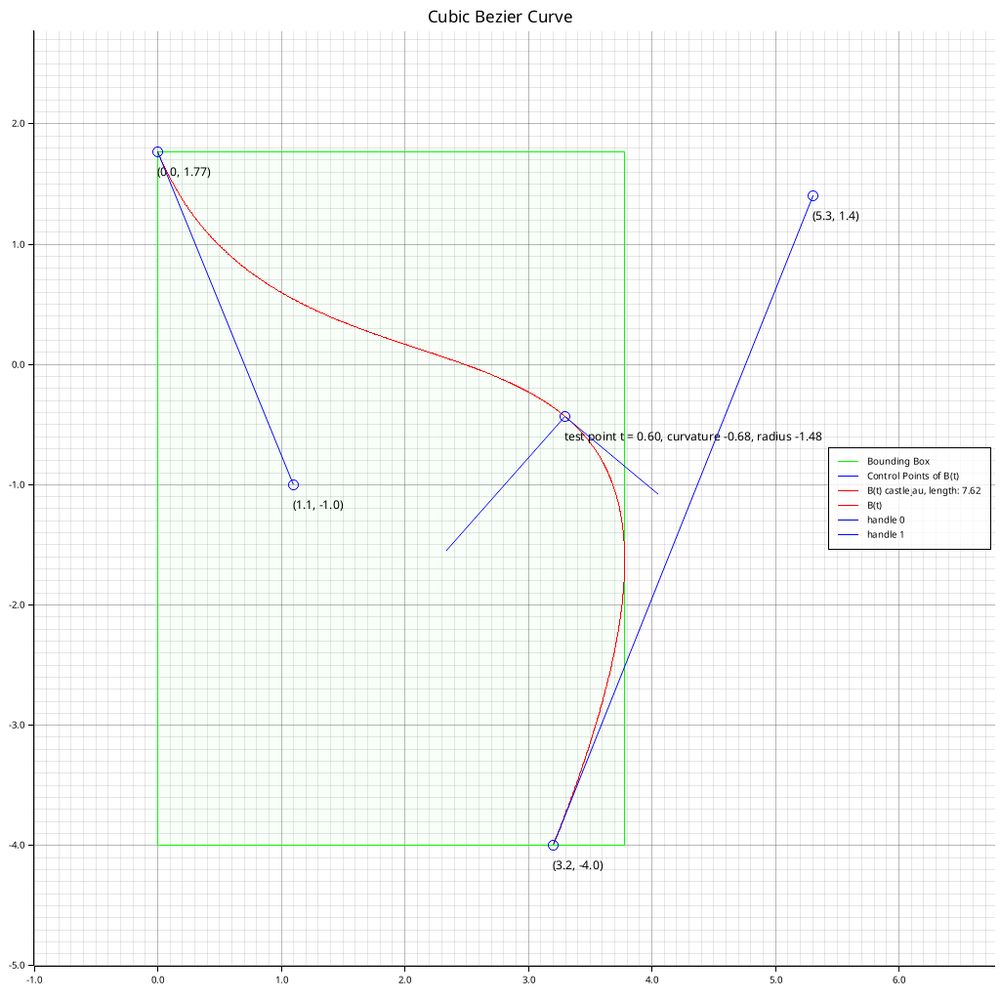
no_std bezier curves in rust github.com/dorianprill/... and I have a branch here that visualizes tangent and curvature (1.0 / radius) github.com/lucasw/strok...,
example curve using plotters below. Next thing to do is make some adjustments to the closest point finding.
example curve using plotters below. Next thing to do is make some adjustments to the closest point finding.
July 5, 2025 at 2:18 PM
no_std bezier curves in rust github.com/dorianprill/... and I have a branch here that visualizes tangent and curvature (1.0 / radius) github.com/lucasw/strok...,
example curve using plotters below. Next thing to do is make some adjustments to the closest point finding.
example curve using plotters below. Next thing to do is make some adjustments to the closest point finding.
Compile the same code twice, once with f32 and the other with f64, and then access it like my_package::f32::foo and my_package::f64::foo (maybe glam or others do something similar? I was going to look if I couldn't get it working but it worked)
github.com/lucasw/cloth...
github.com/lucasw/cloth...
compile an f32 and f64 version of clothoid curve, with the f32 aiming… · lucasw/clothoid_curve_rs@8d8df6d
… to be no_std
github.com
July 4, 2025 at 2:04 PM
Compile the same code twice, once with f32 and the other with f64, and then access it like my_package::f32::foo and my_package::f64::foo (maybe glam or others do something similar? I was going to look if I couldn't get it working but it worked)
github.com/lucasw/cloth...
github.com/lucasw/cloth...
Optional function as parameter to another function
pub fn foo<F: Fn(f64) -> f64>(
...
my_fn: Option<&F>
)
call it with None like this:
foo(..., None::<fn(f64) -> f64>.as_ref())
pub fn foo<F: Fn(f64) -> f64>(
...
my_fn: Option<&F>
)
call it with None like this:
foo(..., None::<fn(f64) -> f64>.as_ref())
July 1, 2025 at 9:35 PM
Optional function as parameter to another function
pub fn foo<F: Fn(f64) -> f64>(
...
my_fn: Option<&F>
)
call it with None like this:
foo(..., None::<fn(f64) -> f64>.as_ref())
pub fn foo<F: Fn(f64) -> f64>(
...
my_fn: Option<&F>
)
call it with None like this:
foo(..., None::<fn(f64) -> f64>.as_ref())
"2007: Scott Hassan and Steve Cousins found Willow Garage... it would create the PR2 research robot and the wildly successful ROS operating system. ROS is used to this day by enthusiastic researchers and frustrated companies who can’t figure out how to migrate off of it."

A Brief, Incomplete, and Mostly Wrong History of Robotics | Discussion

A Brief, Incomplete, and Mostly Wrong History of Robotics
(An homage to one of my favorite pieces on the internet: A Brief, Incomplete, and Mostly Wrong History of Programming Languages)
generalrobots.substack.com
June 30, 2025 at 5:59 PM
"2007: Scott Hassan and Steve Cousins found Willow Garage... it would create the PR2 research robot and the wildly successful ROS operating system. ROS is used to this day by enthusiastic researchers and frustrated companies who can’t figure out how to migrate off of it."
Reposted by lucasw
🎤 #rustconf Session Announcement: Yang Zhou
“Rust for Robotics: Safer, Faster Systems for Autonomous Applications”
→ rustconf.com/schedule/#1480
#rustlang
“Rust for Robotics: Safer, Faster Systems for Autonomous Applications”
→ rustconf.com/schedule/#1480
#rustlang

June 18, 2025 at 8:13 PM
🎤 #rustconf Session Announcement: Yang Zhou
“Rust for Robotics: Safer, Faster Systems for Autonomous Applications”
→ rustconf.com/schedule/#1480
#rustlang
“Rust for Robotics: Safer, Faster Systems for Autonomous Applications”
→ rustconf.com/schedule/#1480
#rustlang