Nico Bohlinger
@nicobohlinger.bsky.social
35 followers
36 following
21 posts
26 | Morphology-aware Robotics, RL Research | PhD student at @ias-tudarmstadt.bsky.social
Posts
Media
Videos
Starter Packs


Reposted by Nico Bohlinger
Antonin Raffin
@araffin.bsky.social
· Jul 7

Getting SAC to Work on a Massive Parallel Simulator: Tuning for Speed (Part II) | Antonin Raffin | Homepage
This second post details how I tuned the Soft-Actor Critic (SAC) algorithm to learn as fast as PPO in the context of a massively parallel simulator (thousands of robots simulated in parallel).
araffin.github.io

Nico Bohlinger
@nicobohlinger.bsky.social
· Jun 13

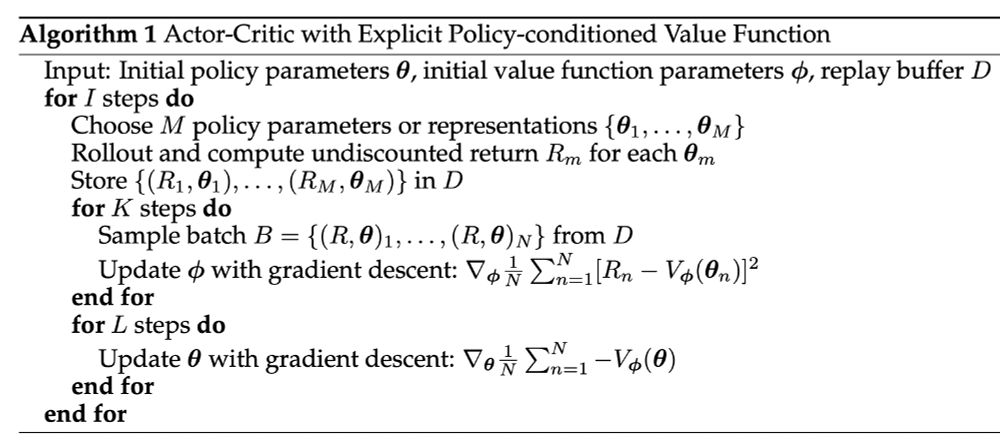
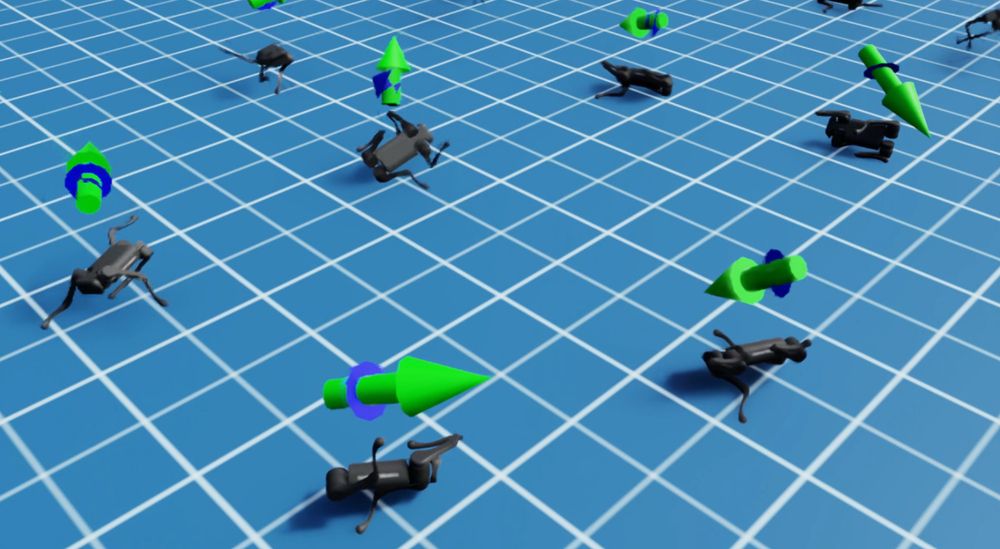
Massively Scaling Explicit Policy-conditioned Value Functions
We introduce a scaling strategy for Explicit Policy-Conditioned Value Functions (EPVFs) that significantly improves performance on challenging continuous-control tasks. EPVFs learn a value function V(...
arxiv.org






Reposted by Nico Bohlinger


Nico Bohlinger
@nicobohlinger.bsky.social
· Mar 18

Nico Bohlinger
@nicobohlinger.bsky.social
· Mar 11
Reposted by Nico Bohlinger
Antonin Raffin
@araffin.bsky.social
· Mar 10
Getting SAC to Work on a Massive Parallel Simulator: An RL Journey With Off-Policy Algorithms (Part I) | Antonin Raffin | Homepage
This post details how I managed to get the Soft-Actor Critic (SAC) and other off-policy reinforcement learning algorithms to work on massively parallel simulators (think Isaac Sim with thousands of ro...
araffin.github.io