



Victor Geadah
@vgeadah.bsky.social
PhD student in statistical neuroscience at Princeton. https://victorgeadah.github.io
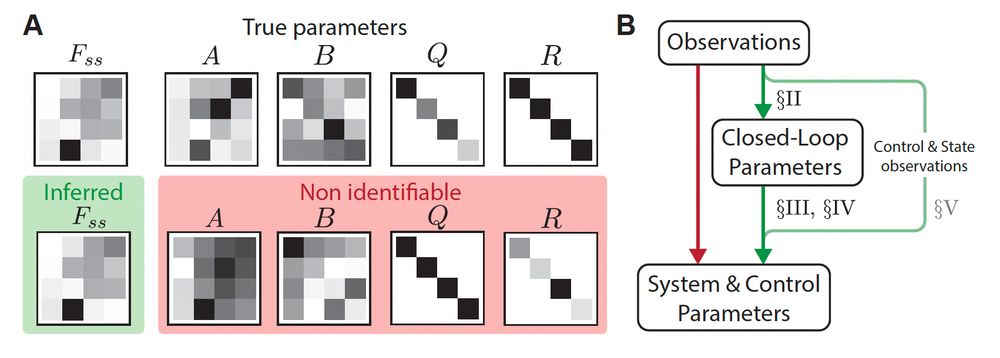
One of my favorite equations, after assumptions, details how the system dynamics (A) and control cost (Q) interact with the closed-loop dynamics (F).
This reveals a continuum of environment-objective pairs consistent with behavior. Inverse RL / IOC typically lies at one end of this continuum.
This reveals a continuum of environment-objective pairs consistent with behavior. Inverse RL / IOC typically lies at one end of this continuum.

December 18, 2025 at 5:54 PM
One of my favorite equations, after assumptions, details how the system dynamics (A) and control cost (Q) interact with the closed-loop dynamics (F).
This reveals a continuum of environment-objective pairs consistent with behavior. Inverse RL / IOC typically lies at one end of this continuum.
This reveals a continuum of environment-objective pairs consistent with behavior. Inverse RL / IOC typically lies at one end of this continuum.
We show that the joint problem boils down to two steps:
1. Infer closed-loop parameters (which can be done efficiently with SSM methods ✅)
2. Derive equations relating the parameters of interest in setting the closed-loop dynamics.
See our paper (also on arXiv, link above) for details!
1. Infer closed-loop parameters (which can be done efficiently with SSM methods ✅)
2. Derive equations relating the parameters of interest in setting the closed-loop dynamics.
See our paper (also on arXiv, link above) for details!
December 18, 2025 at 5:54 PM
We show that the joint problem boils down to two steps:
1. Infer closed-loop parameters (which can be done efficiently with SSM methods ✅)
2. Derive equations relating the parameters of interest in setting the closed-loop dynamics.
See our paper (also on arXiv, link above) for details!
1. Infer closed-loop parameters (which can be done efficiently with SSM methods ✅)
2. Derive equations relating the parameters of interest in setting the closed-loop dynamics.
See our paper (also on arXiv, link above) for details!
In a system subject to unobserved control, can you infer both the underlying dynamics and the control objective? 🤔
A year ago, I was presenting our work at IEEE CDC on solving this problem for stochastic LQR.
arxiv.org/abs/2502.15014
Short 🧵 on the results, and how I think about them a year later.
A year ago, I was presenting our work at IEEE CDC on solving this problem for stochastic LQR.
arxiv.org/abs/2502.15014
Short 🧵 on the results, and how I think about them a year later.

December 18, 2025 at 5:54 PM
In a system subject to unobserved control, can you infer both the underlying dynamics and the control objective? 🤔
A year ago, I was presenting our work at IEEE CDC on solving this problem for stochastic LQR.
arxiv.org/abs/2502.15014
Short 🧵 on the results, and how I think about them a year later.
A year ago, I was presenting our work at IEEE CDC on solving this problem for stochastic LQR.
arxiv.org/abs/2502.15014
Short 🧵 on the results, and how I think about them a year later.
We demonstrated CLDS on a range of synthetic tasks and datasets, showing how to link dynamical structure to behaviorally relevant variables in a transparent way. [5/6]

December 3, 2025 at 5:44 PM
We demonstrated CLDS on a range of synthetic tasks and datasets, showing how to link dynamical structure to behaviorally relevant variables in a transparent way. [5/6]
CLDS = linear dynamical system in latent state (x), whose coefficients depend nonlinearly on task conditions (u) through Gaussian processes (GP)
CLDS leverages conditions to approximate the full nonlinear dynamics with locally linear LDSs, bridging the benefits of linear and nonlinear models. [3/5]
CLDS leverages conditions to approximate the full nonlinear dynamics with locally linear LDSs, bridging the benefits of linear and nonlinear models. [3/5]

December 3, 2025 at 5:44 PM
CLDS = linear dynamical system in latent state (x), whose coefficients depend nonlinearly on task conditions (u) through Gaussian processes (GP)
CLDS leverages conditions to approximate the full nonlinear dynamics with locally linear LDSs, bridging the benefits of linear and nonlinear models. [3/5]
CLDS leverages conditions to approximate the full nonlinear dynamics with locally linear LDSs, bridging the benefits of linear and nonlinear models. [3/5]